「見る」「持つ」「運ぶ」
搬送時の3動作を自動化するロボットシステム3点セット
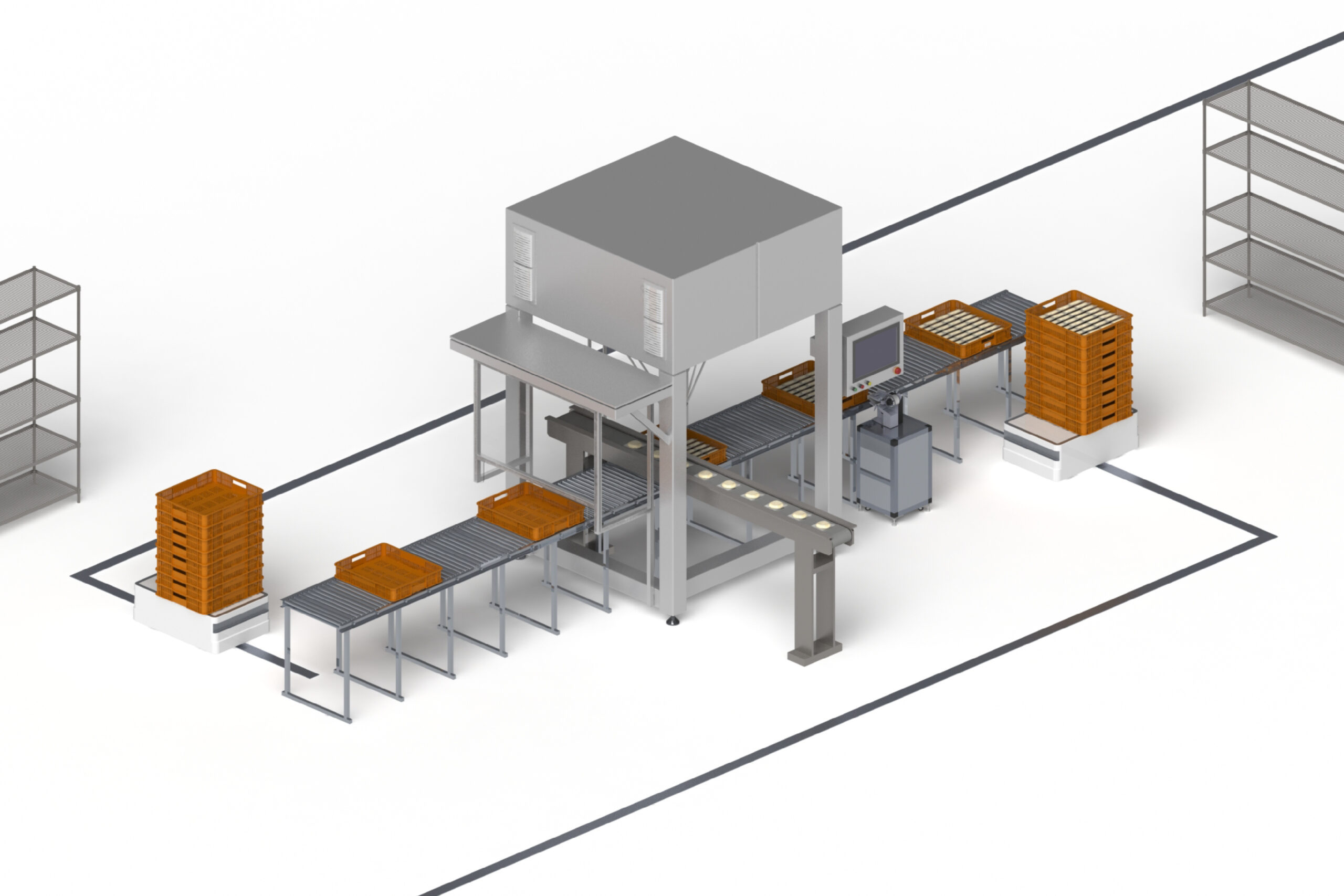
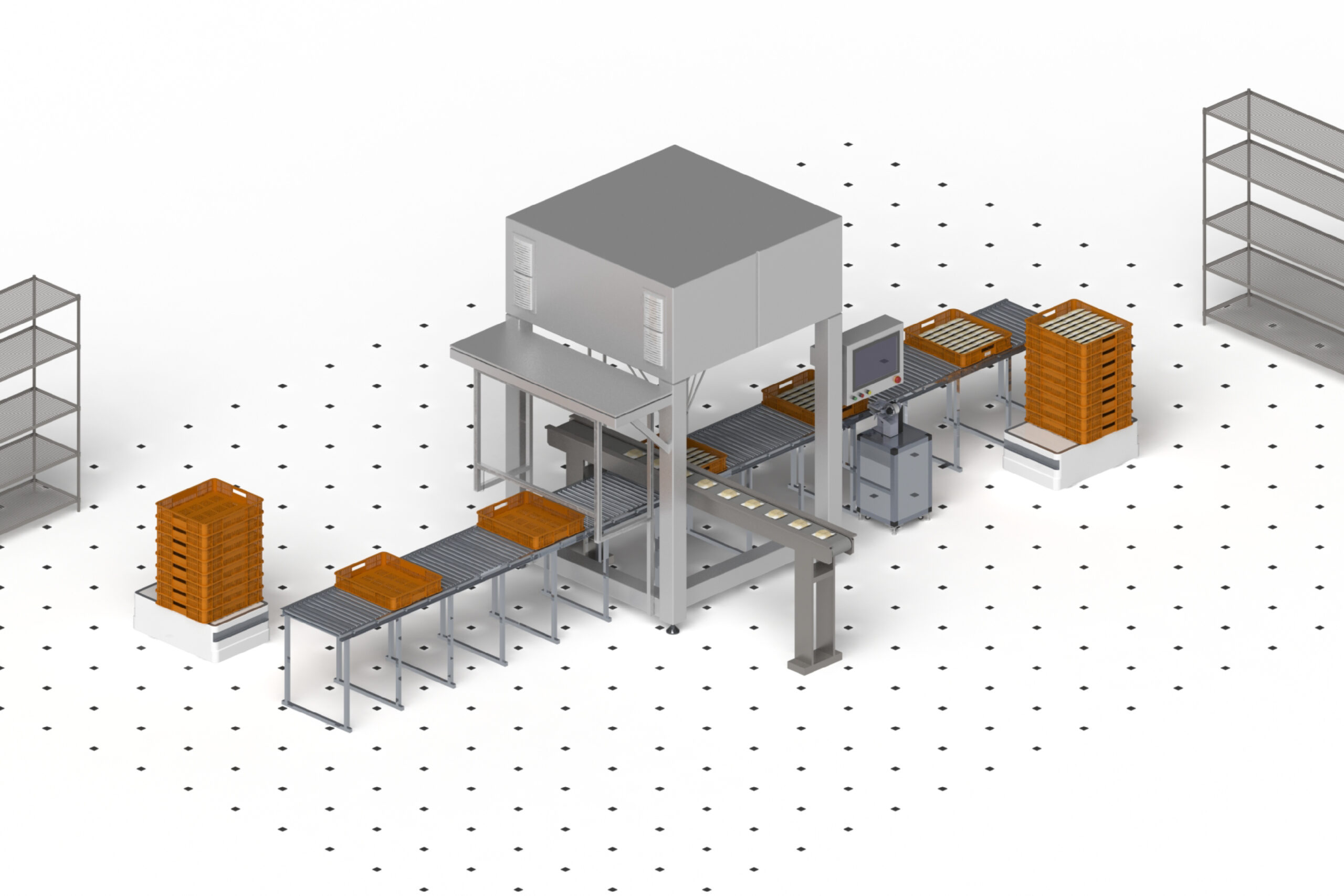
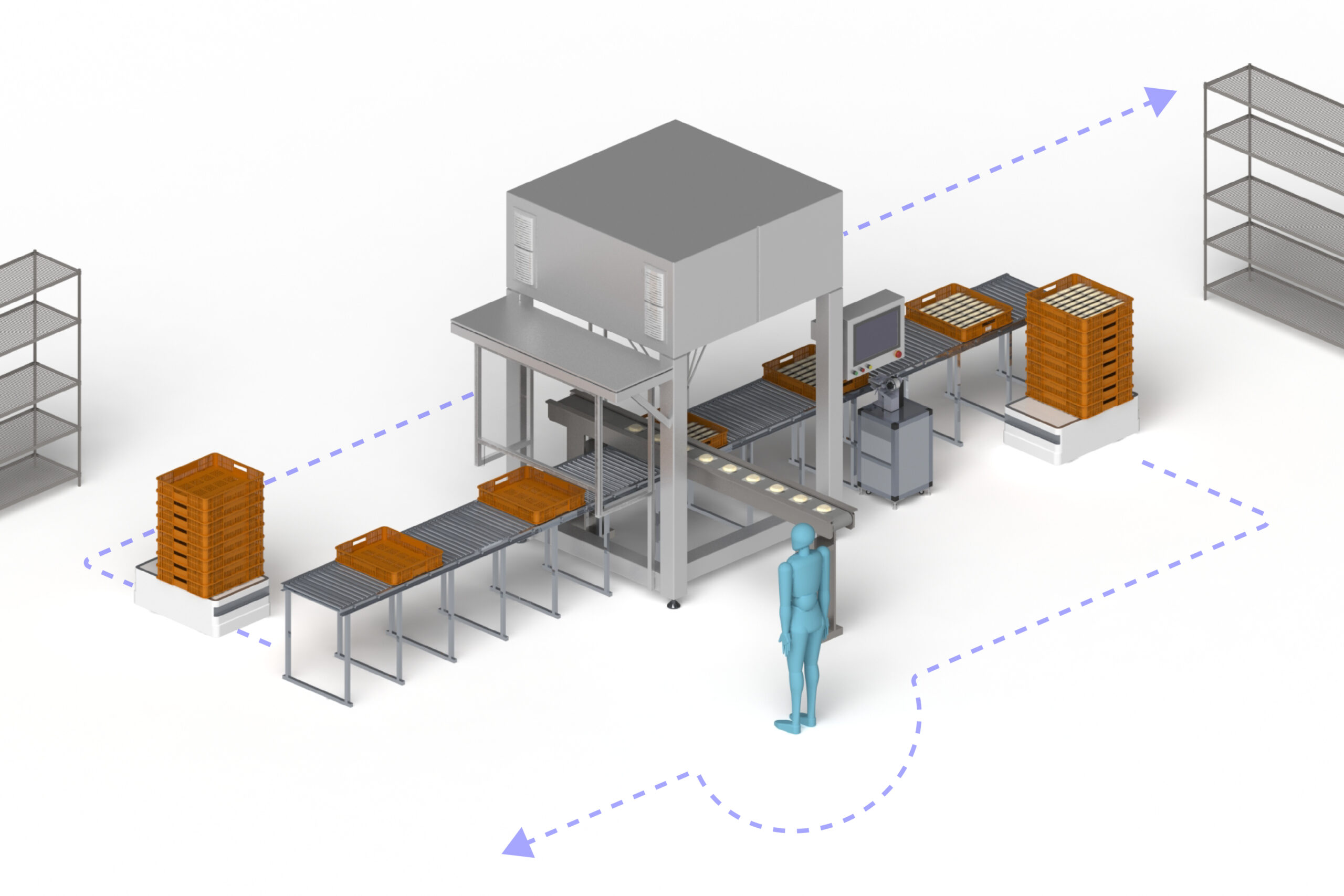
3Dビジョンでワークを認識、ロボットでピック&プレイス、AGVで搬送。
3つのユニットを組み合わせることで、製造工程内のあらゆる「搬送」を自動化します。
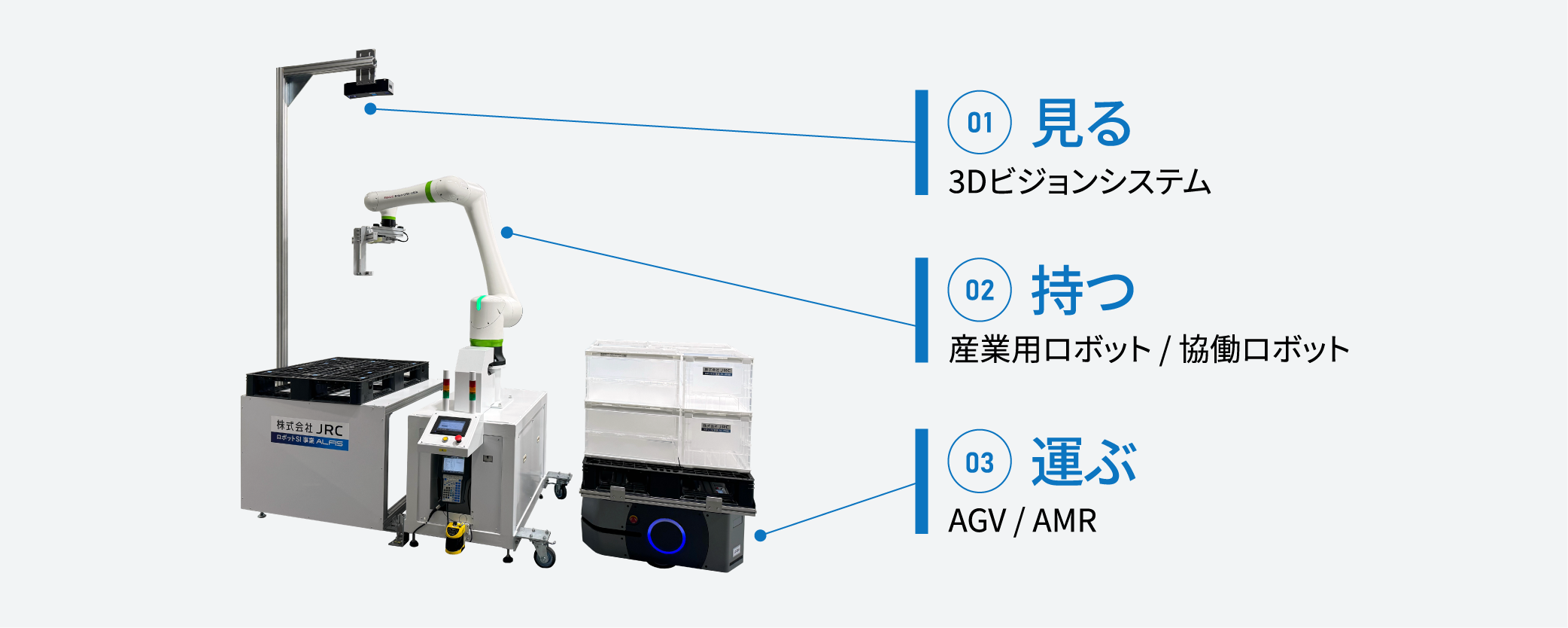
見る:3Dビジョンシステム
ピック位置上部にカメラセンサを固定し、撮像されたデータをビジョンシステムが解析。
ピックするワークの位置や大きさを自動で認識することで、ロボットで正確にピック&プレイスすることが
可能になります。
認識の安定度は設置場所の照明やワークの外観などさまざまな条件に左右されます。
3Dビジョンの活用ノウハウを活かし、ソフト・ハード両面から最適な設計を行います。

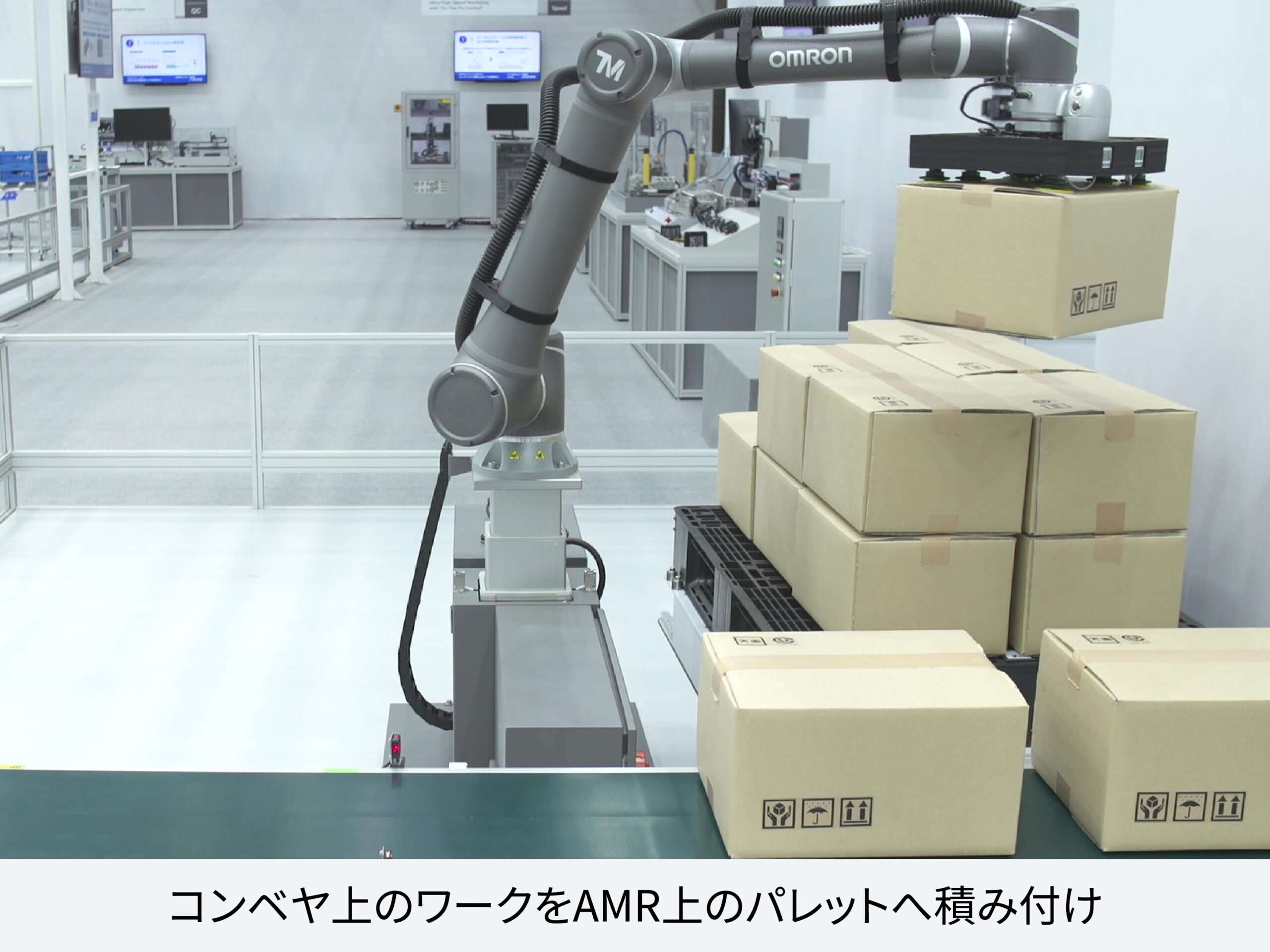
持つ:産業用ロボット / 協働ロボット
AGVやAMRが運んできたワークをおろしたり、供給されたワークを
AGVやAMRの上に積み上げたり、ワークを移し替える作業は
ロボットが行います。
積み付け、積み下ろしといった作業はワークの重さや
作業姿勢により労災の原因になることも少なくありません。
作業をロボットに任せることで、人手不足の解消や
生産性向上だけでなく、労災リスクの低減にもつながります。

運ぶ:AGV / AMR
AGVあるいはAMRを使ってワークを運搬。
コンベヤのように新たに大規模な設備を設置する必要はなく、人やフォークリフトが移動している床の上を
移動するため、人の通路をふさがずに導入したい、短期間で立ち上げたい、導入後にも経路変更をしたいと
いったご要望に対応することが可能です。
磁気テープ等の設置物の有無、運搬ルートの種類数や変更頻度、障害物の有無などの条件に合わせて
最適なものを選択し、ご提案いたします。