トップページ
ALFISについて
ALFIS のミッション
ALFIS ロボットシステムの特長
会社概要
事業所・拠点一覧
提携企業
SOLOMON
製品・サービス
ー 製品情報 ー
ロボットパレタイズシステム
ロボットデパレタイズシステム
バラ積みピッキングシステム
高速ピッキングシステム
ロボットケーサー
Robogie(ロボギー)
自動機 OEM
ー 特設ページ ー
食品業界向けソリューション
製造ラインへのロボットシステム導入
お役立ちコラム
課題解決コラム
技術コラム
ロボット導入事例
資料ダウンロード
新着情報
中途採用
お問い合わせ
個人情報保護方針
クッキー(Cookie)等の取り扱いについて
サイトマップ
ALFIS〈アルフィス〉|株式会社JRC ロボットSIerブランド
事業所・拠点一覧
新着情報
中途採用
パートナー募集
ALFISについて
about
ALFISについて
一覧を見る
ALFIS のミッション
ALFIS ロボットシステムの特長
会社概要
事業所・拠点一覧
提携企業
製品・サービス
products
製品情報
ロボットパレタイズシステム
(パレット積み付け自動化)
ロボットデパレタイズシステム
(パレット荷下ろし自動化)
バラ積みピッキングシステム
パラレルリンクロボット搭載
高速ピッキングシステム
ロボットケーサー
(箱詰め自動化)
移動式・協働ロボットユニット
Robogie(ロボギー)
自動機 OEM
特設ページ
食品業界向けソリューション
製造ラインへのロボットシステム導入
お役立ちコラム
Column
課題解決コラム
技術コラム
お問い合わせ
資料ダウンロード
新着情報
news
JRC ロボットSIer〈アルフィス〉
新着情報
拠点集約(和光工場の草加工場への集約)に関するお知らせ
2026年07月16日
未分類
このたび株式会社JRCは、業務効率化およびサービス向上を図るため、和光工場を草加工場に集約することとなりました。 これに伴い、2026年...
遠隔サポート・保守・トラブル早期対応システム
2026年07月15日
課題解決コラム
Before パレタイズ工程で装置に異常が発生した際、現場では原因の特定が難しく、担当者による確認が必要だった。対応まで装置が停止し、生...
遠隔監視とはどのようなシーンで役立つシステム?そのメリットや選び方のポイント
2026年07月15日
技術コラム
工場の設備や施設を効率的に監視したいとお考えのご担当者様に向けて、遠隔監視システムについて解説します。 この記事では、遠隔監視の基本的な...
お菓子製造ラインで一時的な副原料投入
2026年06月17日
課題解決コラム
Before 一部商品製造時にのみ特定の副原料を投入する作業を、作業者1名で対応し、1時間に3回実施していた。作業時には階段を上り、上部...
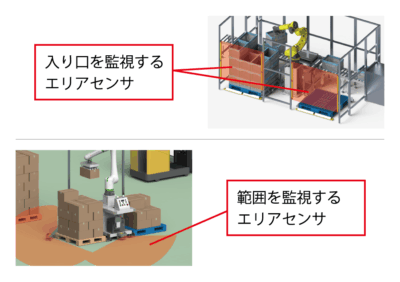
エリアセンサとは?特徴や用途・他のセンサとの違いを解説
2026年05月13日
技術コラム
エリアセンサとは、設定したエリア内の物体を光や音波を使用して検知するセンサです。仕組みはシンプルですが、さまざまな用途や方式があります。...
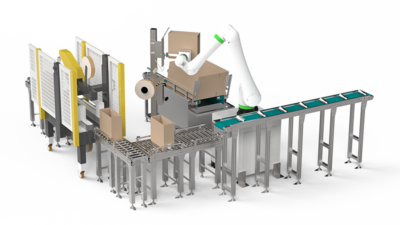
ダンボール製函・スパウトパウチ箱詰め・封函
2026年05月13日
課題解決コラム
Before 作業員2名が段ボールの組み立て、底のI貼り、箱詰めを行い封函機で封函する。 After 協働ロボット1台で段ボールの組み立...
製造業で活用されるパラレルリンクロボットの事例を紹介!その主な用途とは
2026年04月15日
技術コラム
製造ラインの生産性向上や自動化を検討中のご担当者様に向けて、高速かつ精密な動作が可能なパラレルリンクロボットについて解説します。 この記...
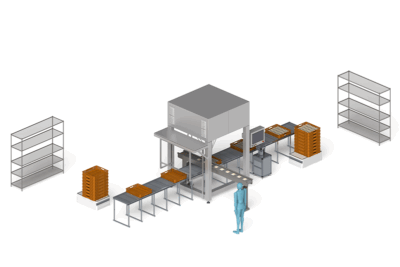
番重詰め自動化・AMR搬送
2026年04月15日
課題解決コラム
Before 空の番重を置き場から運んできて、製品を詰め、詰め終わった番重を次工程へ搬送する作業を、人手で行っていた。 After 積み...
パレット荷降ろし工程を自動化 ロボットデパレタイズ×パレットコンベヤ導入事例
2026年03月18日
課題解決コラム
Before 工場や倉庫に入荷したパレットから、 段ボール箱や袋などの重量物を 作業者1名が手作業で降ろしていた。 After ロボット...
産業機械をOEMで製造するケースとは?生産ラインを設計する前に知っておくべきこと
2026年03月18日
技術コラム
「産業機械」とは、分かりやすくいえば工場の生産ラインで使用される機械の総称です。一般の生活で目にすることはほぼありませんが、さまざまな商...
ピッキングロボットとは?導入するメリットや注意点について紹介
2026年02月18日
技術コラム
物流業界では、作業効率や人手不足の解消が重要な課題であり、その解決策として注目を集めているのがピッキングロボットです。 この記事では、ピ...
小瓶マルチパック包装機
2026年02月18日
課題解決コラム
Before パートタイマー複数人で、手作業で 小瓶をそろえてマルチ包装していた。予定生産数を確保するために、パートタイマー複数人で作業...
1
2
›
»
ブラウザの設定で、JavaScriptを有効にしてください。