











エリアセンサとは、設定したエリア内の物体を光や音波を使用して検知するセンサです。仕組みはシンプルですが、さまざまな用途や方式があります。
この記事では、エリアセンサの特徴や用途、他のセンサとの違いについて解説します。
エリアセンサとは
エリアセンサとは設定された範囲を面で捉えるセンサのことで、範囲内にある物体を何らかの方法で検出するセンサの総称です。
面の捉え方は、大きく分けて以下2つの方式があります。
- カメラと同じ仕組みで特定の範囲内を撮像する方式
- 投光部と受光部を結ぶ線(光束)を複数配置して面を構成する方式
それぞれ用途の異なる方式のため、「エリアセンサ」と聞いてイメージするものは現場によって異なるでしょう。
エリアセンサの特徴
カメラと同じ仕組みで特定の範囲内を撮像する方式の場合、あらかじめ設定した範囲内の平面を一度に撮像して検知可能です。この仕組みを利用して、三次元の空間を検知できるセンサもあります。
エリアセンサは面内にある物体の状態を瞬時に検知できるものの、範囲が限定されます。広範囲の検知には、後述するラインセンサが適しているでしょう。
複数の投光部と受光部のペアで面を構成する方式の場合、検知する範囲を囲うように機器を配置します。
エリアセンサの仕組み
エリアセンサには大きく分けて以下の2つの方式があり、それぞれ分けて解説します。
- カメラと同様に撮像素子とレンズ、画像処理回路を持つセンサ
- 投光部と受光部、制御回路を持ち、複数か所に設置されるセンサ
撮像するタイプのセンサは、物体の形状や質感、色などを検知できます。「イメージセンサ」「ビジョンセンサ」と呼ばれる場合もあります。
AIと組み合わせることで、人間による目視を越える高度な画像処理を行うことも可能です。
投光部と受光部を持つセンサは一般的に「光電センサ」と呼ばれ、投光部と受光部の間をさえぎった物体を検知します。また、物体からの反射や、透過の状態を検出することも可能です。

詳細はこちら
エリアセンサの種類
エリアセンサの分類方法はいくつかありますが、照射する波動による分類はその1つです。
ここでは、赤外線式・超音波式・可視光線式の3つの種類について解説します。
赤外線式(赤外線センサ)
赤外線を投光・受光して、対象物が光を遮ることで検出します。ライトカーテンなどのエリアセンサで広く使われています。また、赤外線カメラのように温度差を利用するタイプもあり、人感センサなどに応用されています。
超音波式(超音波センサ)
超音波が物体に当たって反射し、戻ってくるまでの時間を計測して物体の位置を検出できます。物体そのものが発する超音波も、検出可能です。
超音波式は、以下のような物体の検出に適しています。
- フィルムやガラス、液体など形状が不安定な物体
- 網やバネなど形状が複雑な物体
超音波式は、検出がむずかしい物体でも検出可能です。物体の色や表面の状態に影響されにくく、ほこりや汚れの有無に関係なく物体を捉えられる点が特長です。
可視光線式
可視光線式は目視に近い判定が可能で、色の違いも識別できることから、人間の目の代わりになるセンサであるといえます。
ただし、産業用途では外乱光の影響を受けにくい赤外線が主流で、可視光線が使われるのは特殊な用途に限られます。
可視光線式の使い方として、以下2つの方法があります。
- 物体を照明し、反射する光や色をセンサが検知する
- 一方から発射した光を他方にある受光部で受け、間にある物体を検知する
従来は目視検査を行っていた工程で、人間による判定のノウハウをAIに学習させることで高度な自動判定が可能になります。
エリアセンサの用途
エリアセンサは、工場の自動化・省力化においてさまざまな用途に利用されます。
単に物体(ワーク)の存在や液体などのレベル(量)を検知するだけであれば、ほかの簡単な検知方式のほうが手軽に設置でき、運用しやすいでしょう。
エリアセンサならではの代表的な用途として、以下が挙げられます。
- コンベア上のワークの状態(向きや色、位置関係など)を把握する
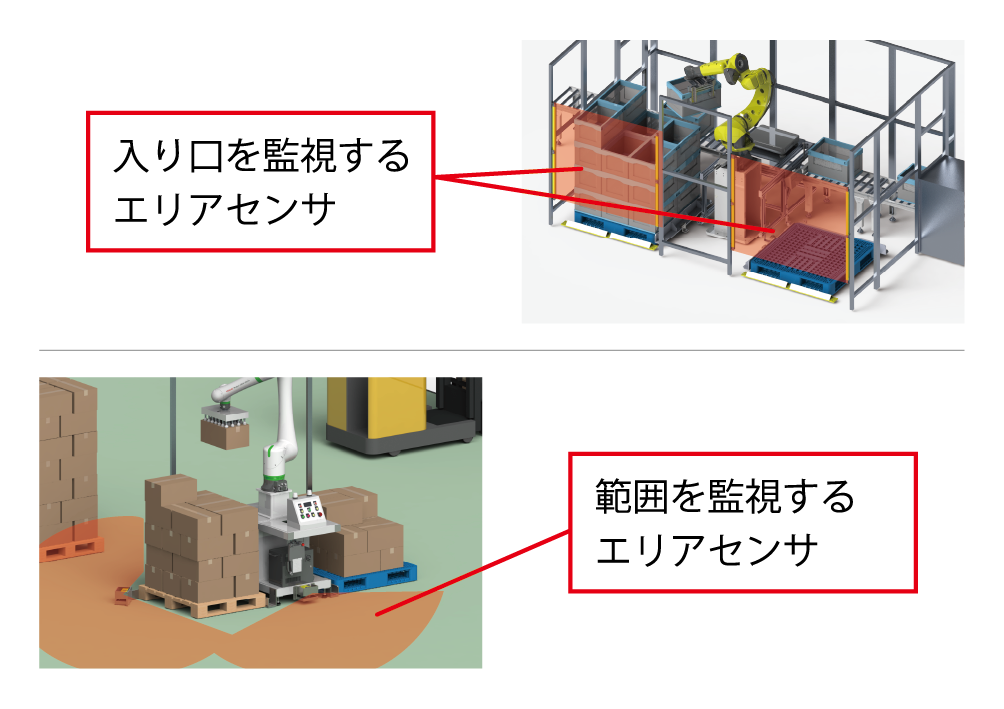
- 無人搬送車の周囲の状態を把握する
- 人の侵入・移動を検知する
- 製品や部品の外観をチェックする
エリアセンサと他のセンサとの違い
エリアセンサは物体を面で捉えますが、線で捉える「ラインセンサ」もよく使われます。
また、エリアセンサのうち、複数の光電センサを使用するものは「ライトカーテン」として特定用途で普及しています。
ラインセンサとの違い
ラインセンサとは撮像素子が線状に配置された構造のセンサで、直交する方向に移動させることで平面を撮像できます。
製造ラインではラインセンサを固定して、ワークのほうを移動させて撮像する方法が一般的です。エリアセンサに比べると撮像時の移動時間が必要であるものの、形状や模様などを詳細に捉えることが可能です。
物体表面の凹凸の検査に利用できます。円筒状の立体の曲面は、回転させることで容易に検査可能です。
セーフティライトカーテンとの違い
セーフティライトカーテンは、簡単に「ライトカーテン」と呼ばれることもあります。安全対策を目的として設置されるセンサです。
危険性のある装置周辺に設置し、作業者が立ち入ったことを検知して装置を停止する、アラームを鳴らすなどの対処をするために用いられます。
複数の投光部と受光部を検知エリアの両側に設置し、間を人が通ったことを検知する構造の光電センサであり、エリアセンサの一種です。
フォトセンサとの違い
フォトセンサは、発光部と受光部を組み合わせて物体を検知するセンサで、透過型や反射型などがあります。基本的には1点または狭い範囲を検出するのが特徴です。
エリアセンサは広い面を捉えられ、フォトセンサは小さな範囲を捉えられるセンサです。
ピックアップセンサとの違い
ピックアップセンサは回転体の凹凸を検出するセンサで、磁性体で作られた「検出歯車」とセットで使用します。検出歯車の傍にマグネットとコイルで構成されるピックアップセンサを設置し、回転する歯車の凹凸に合わせてセンサのマグネットが振動する動きを電気信号に変える仕組みです。
回転体に歯車を装着し、回転速度や角度を検出する用途で用いられます。センサが回転体に接触しないため、動きを妨げません。
エリアセンサと同様に製造現場で利用されるセンサですが、構造や用途が異なります。
まとめ
エリアセンサは、設定された範囲内を面で捉えるセンサの総称です。
大きく「カメラで範囲を撮像するタイプ」と「複数の光軸で面を構成するタイプ」に分けられます。
瞬時に物体を二次元、あるいは三次元で把握できることから、検査や選別、自動加工、危険回避などの用途に幅広く用いられます。
JRCはロボットによる製造ラインの自動化・省力化に貢献するシステムインテグレーターです。課題解決コラムでは、生産性向上のためのさまざまな事例を紹介しています。ぜひご覧ください。


