- Before
- コンベヤを流れる台紙の上にサンプル品を載せる作業を、2名で手作業で行っていた。
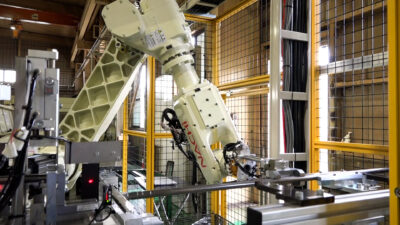
- After
- パラレルリンクロボット1台で自動化。ロボットへサンプル品を供給する作業は1人で行えるため、1名の人員削減。
| ワークの種類 | お試し用サンプル品(ティーバッグ、化粧品など) 封筒に入る大きさ |
|---|---|
| 納入先 | ダイレクトメールの発送代行会社: 真栄包材株式会社 |
| 工程・用途 | 搬送/整列 (台紙の上に正しい向きでサンプル品を載せる) |
| プロダクト | パラレルリンクロボット搭載 高速ピッキングシステム |
課題
封入封緘機の稼働速度は早く、遅れないようにサンプル品を並べる作業は大変な作業だった。
高齢者・障害者の雇用拡大につながるため、作業難易度を下げる目的もあり
自動化を望んでいた。
ご提案
サンプル品を供給コンベヤ上に広げて並べるだけで、ロボットが向きを判断し自動で台紙上に並べる装置をご提案。
受注した案件に合わせて詰めるサンプル品が変化するため、必要に応じて吸着パッドを
交換できるように設計。
供給量が多い時や後工程が停止したときには、オーバーフローを防止するために
サンプル品供給コンベヤが停止。
装置の動き
①供給コンベヤ上にサンプル品を並べる。表裏を合わせて重ならないようにする。
②カメラセンサでサンプル品の向きを判断。
③台紙がコンベヤ上を等間隔に流れてくる。
④パラレルリンクロボットがサンプル品の中央をピックし、回転して向きを合わせ
台紙上に1つ(あるいは1セット)ずつプレイスする。