- Before
- 新規ラインのため、ビフォー状態はなし。
- After
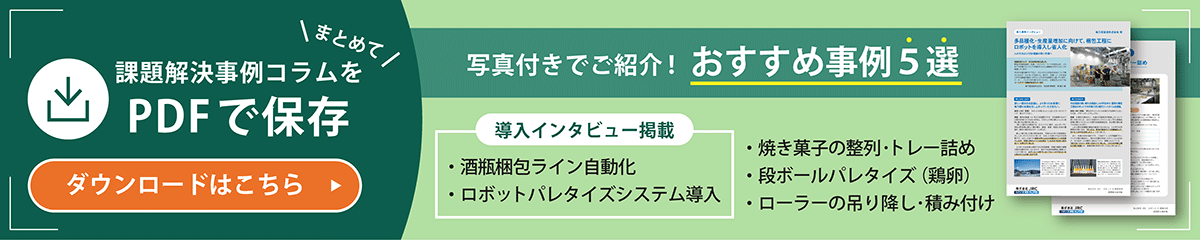
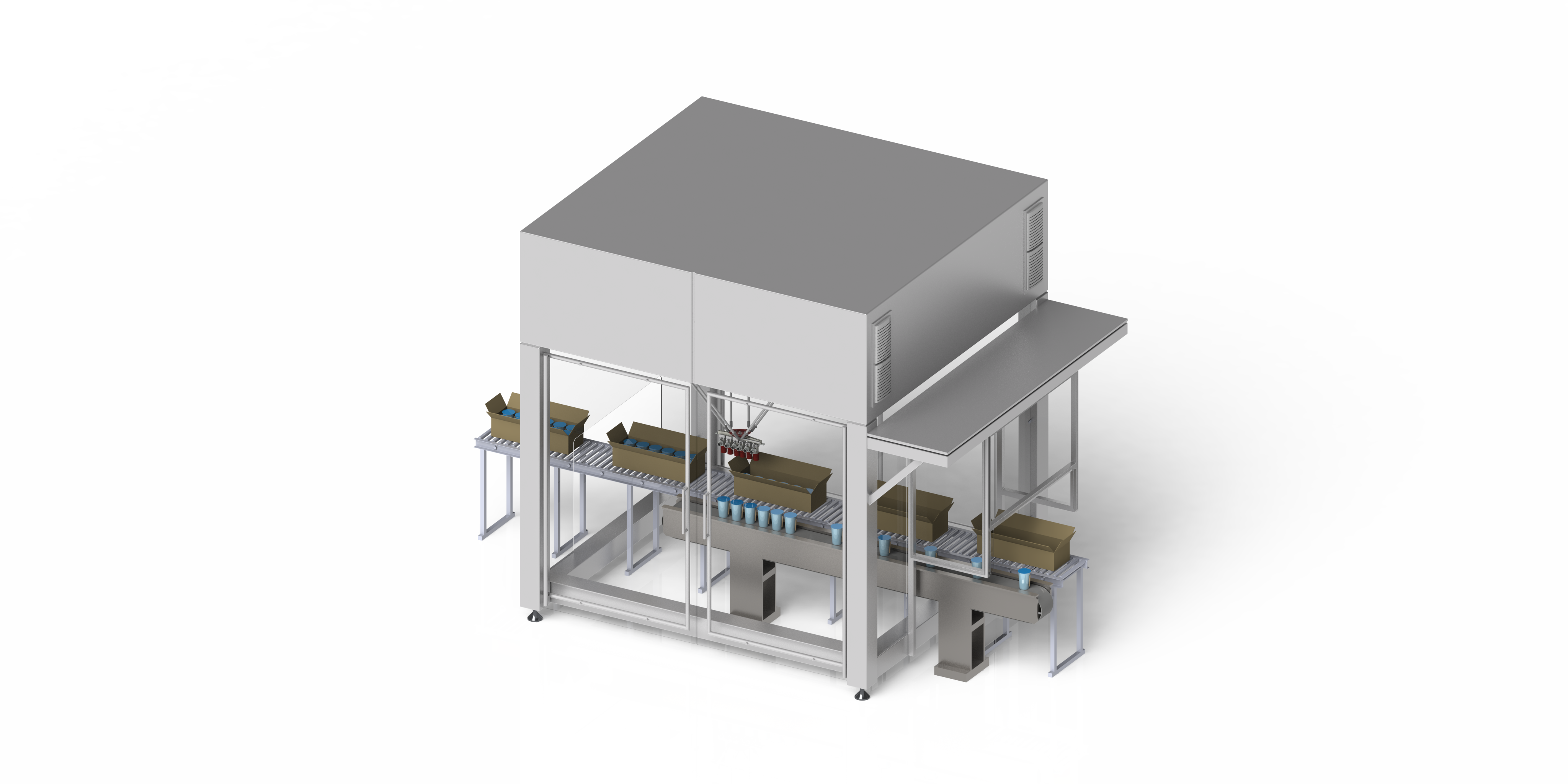
- 1分間に200個のワークを、ロボット1台で自動で段ボール詰め。
| ワークの種類 | チルドカップ飲料 |
|---|---|
| 納入先 | 飲料品メーカー |
| 工程・用途 | 段ボール詰め |
| プロダクト | パラレルリンクロボット搭載 高速ピッキングシステム |
課題
200個/1分の速度で排出される飲料を6個ずつ整列出来るよう、前工程と連携した
システムの開発が必要。
ご提案
まずコンベアで6個ずつ集積し、6個取りのハンドツールでまとめてピックする、
特殊なラインシステムを設計。
装置の動き
①飲料カップがコンベア上に1列に並んで排出される。
②ハンドツールで一気に6個持ち上げられるよう、飲料カップを6個ずつ整列する。
③6個取りハンドで飲料カップをピック。
④6個x2列x1段ずつ段ボールに詰める。
⑤詰め終わった段ボールをコンベアで封函機に送る。