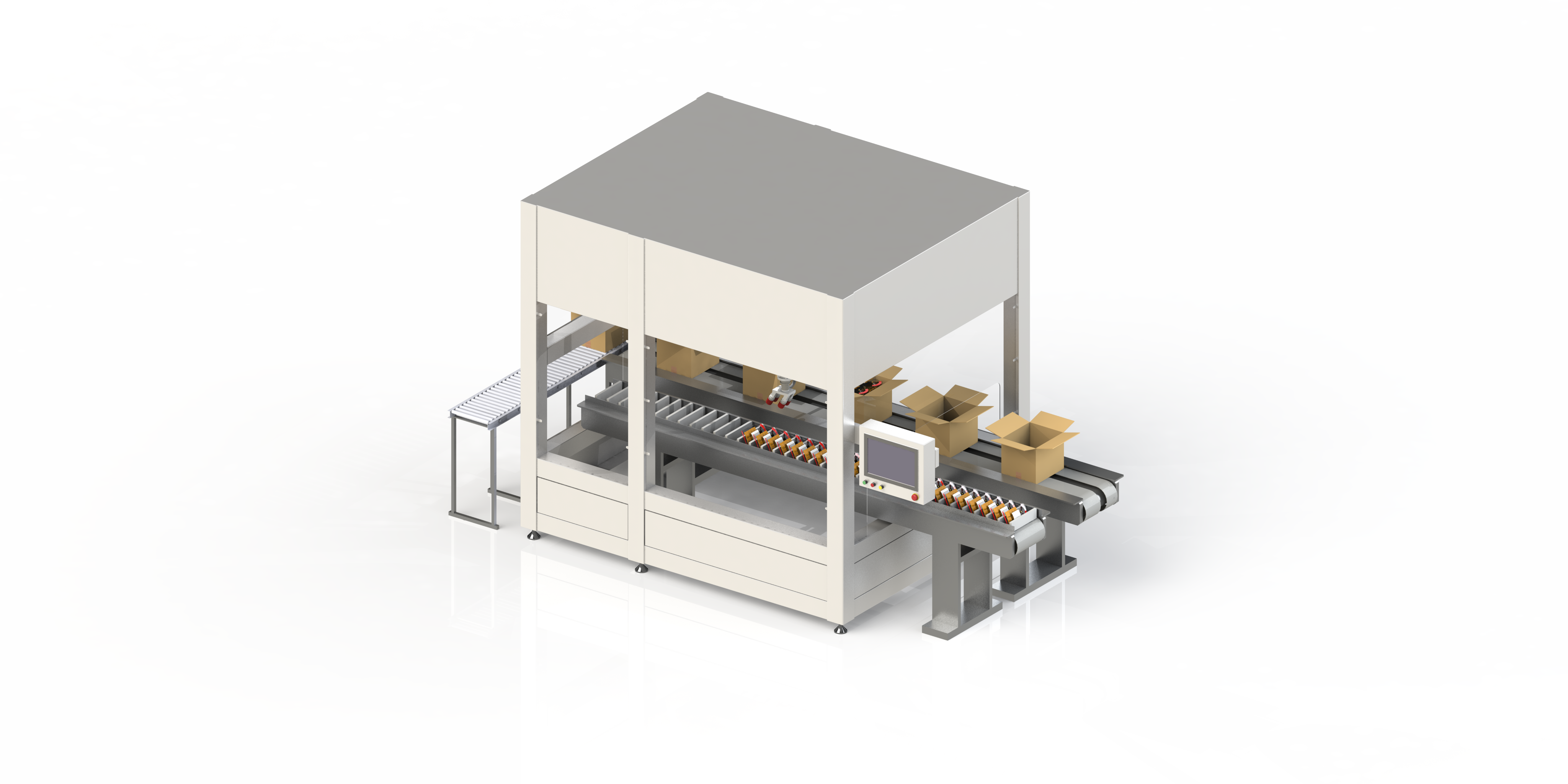
- Before
- 装置1台で段ボール詰め。
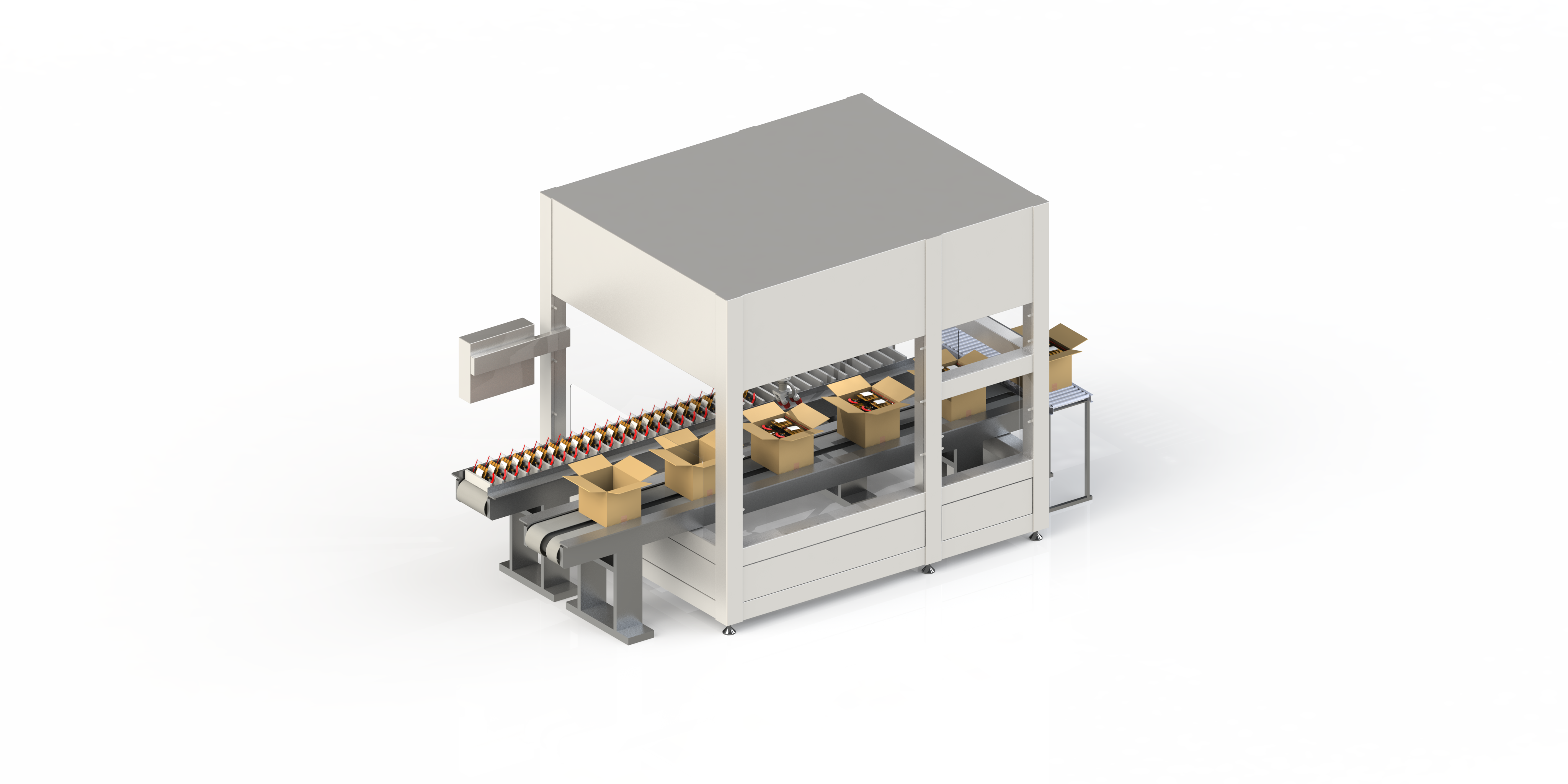
- After
- 古い装置の性能は維持したまま省スペース化。
| ワークの種類 | 菓子が複数個入った大袋パック |
|---|---|
| 納入先 | 食品業界/菓子製造業 |
| 工程・用途 | 段ボール詰め |
| プロダクト | パラレルリンクロボット搭載 高速ピッキングシステム |
課題
既存の段ボール詰め装置が古くなったため、故障する前に新しいものに交換が必要。
ワークが大きいため、ロボットでつかむためのハンドツールが大きく重くなってしまう。
ご提案
既存装置と同等の性能のまま装置を小型化する事で、ライン周りのスペース効率を改善。
軽くて丈夫なオリジナルハンドを設計し、パラレルリンクロボットの高速性を損なわない、
効率の良い装置を開発。
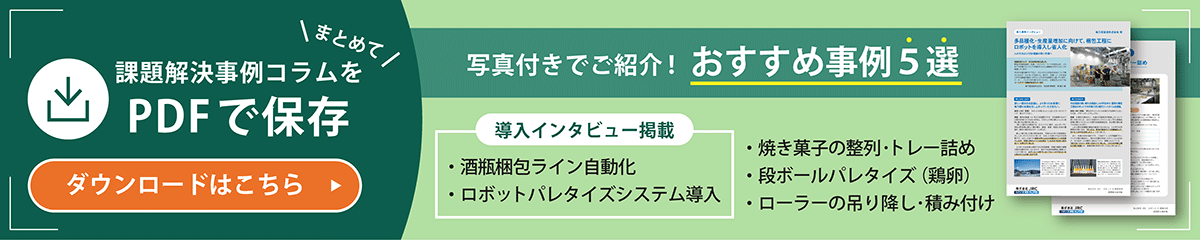
装置の動き
①縦ピロー包装されたお菓子を、バケットコンベヤで等間隔に供給。
②3個どりのロボットハンドで一気に3つずつ袋を掴んで持ち上げ、間隔を詰めて
段ボールに詰める。
1箱20個入りのため、3個x6段+最上段は2個だけ詰める。
③詰め終わった段ボールをコンベヤで封函機へ送る。