
- Before
- かごに満載の状態で供給される金属部品を、パーツフィーダーを使って1つ1つ
供給していた。
- After
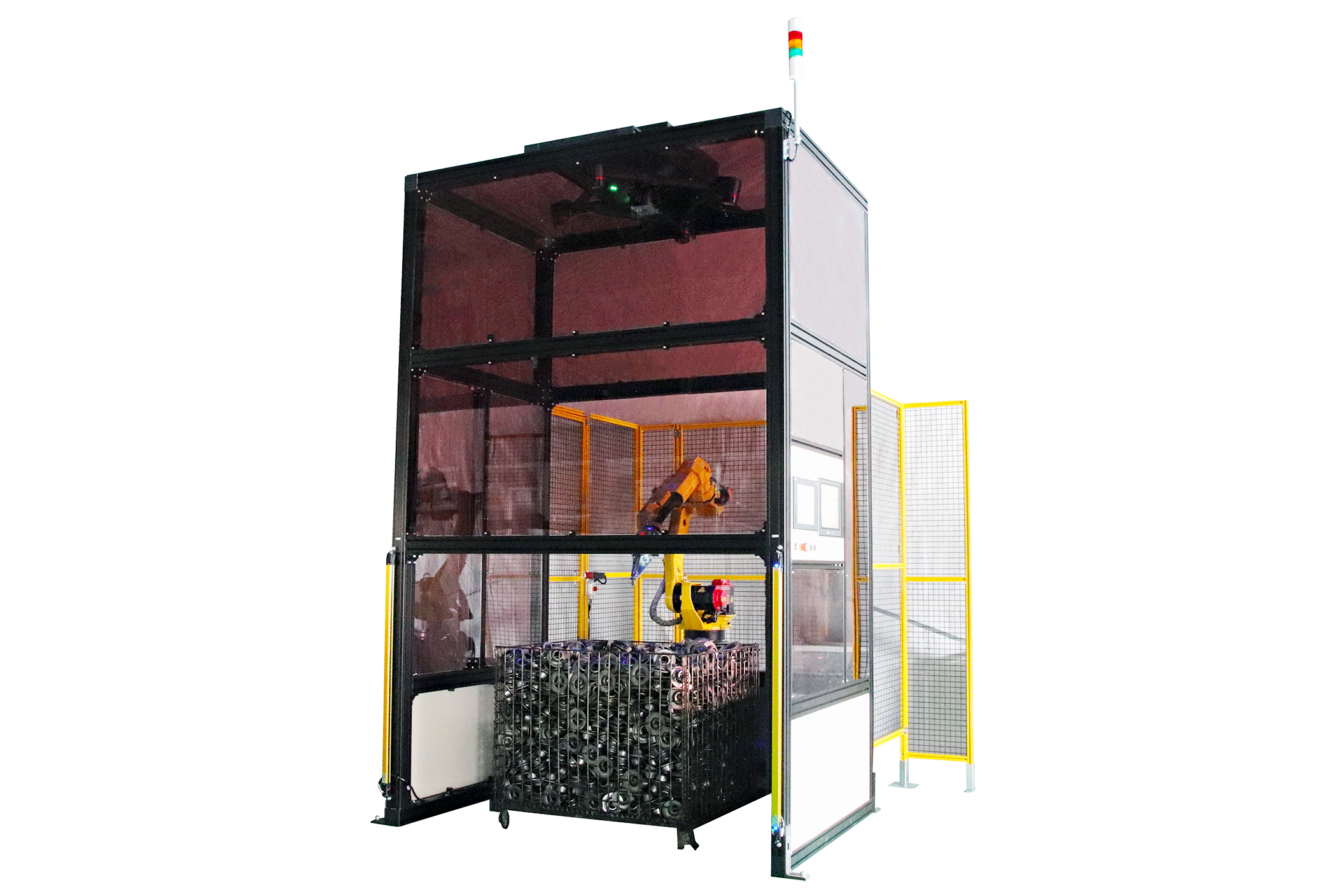
- 3Dビジョン搭載のロボットシステムで、かごから直接ピックしコンベヤへ
供給。
| ワークの種類 | 金属製部品(ハウジング) |
|---|---|
| 納入先 | 株式会社JRC 本社工場 |
| 工程・用途 | バラ積みピッキング/ビンピッキング |
| プロダクト | バラ積みピッキングシステム |
課題
かごの内部の部品を、大型の磁石で持ち上げてパーツフィーダーに供給し、
パーツフィーダーから1つ1つ切り出して次工程に供給していたため、非常に大きな騒音が
発生していた。
ご提案
3Dビジョンシステムを使用し、部品1つ1つの方向を認識してピックすることで、
部品がこすれて発生する音を防止。
装置の動き
①金属部品の入ったかごを、カメラの下の位置にセットする。
②ビジョンシステムが部品の位置を認識する。
③ロボットでピック。
④次工程へ送るためのコンベヤ上へプレイス。
⑤ロボットがプレイス作業中に次の部品をビジョンシステムが認識。
⑥かご内に認識できる部品がなくなるまで、③~⑤を繰り返す。
事例動画