
- Before
- 鍛造部品を旋盤で加工するために、
メッシュパレットから取り出して
ガントリーローダーに供給する工程を、手作業で行っていた。
- After
- メッシュパレットからロボットが自動で取り出し、指定の位置にプレイスする
ことで省人化。作業者1名の削減。
| ワークの種類 | 鍛造部品数種類(ベアリングの外輪・内輪) |
|---|---|
| 納入先 | 金属加工業者 |
| 工程・用途 | 3Dピッキング/ワークをメッシュパレットから取り出す |
| プロダクト | バラ積みピッキングシステム |
課題
重いワークを運ぶ重労働、単純作業を省人化。
数千個のワークを取り出して加工するため、夜勤の時間帯にも作業があり、人件費が
かさんでいる。
ご提案
3Dビジョンを使ったピッキングシステムをご提案。ワークの形状をあらかじめ
3DCADデータで登録しておくことで、正確に位置を認識することが可能に。
これにより、パレットからのワークの取り出しをロボットで行えるようになった。
3DCADデータがあり、ハンドで内径を把持できる形状であればワークの追加も可能。
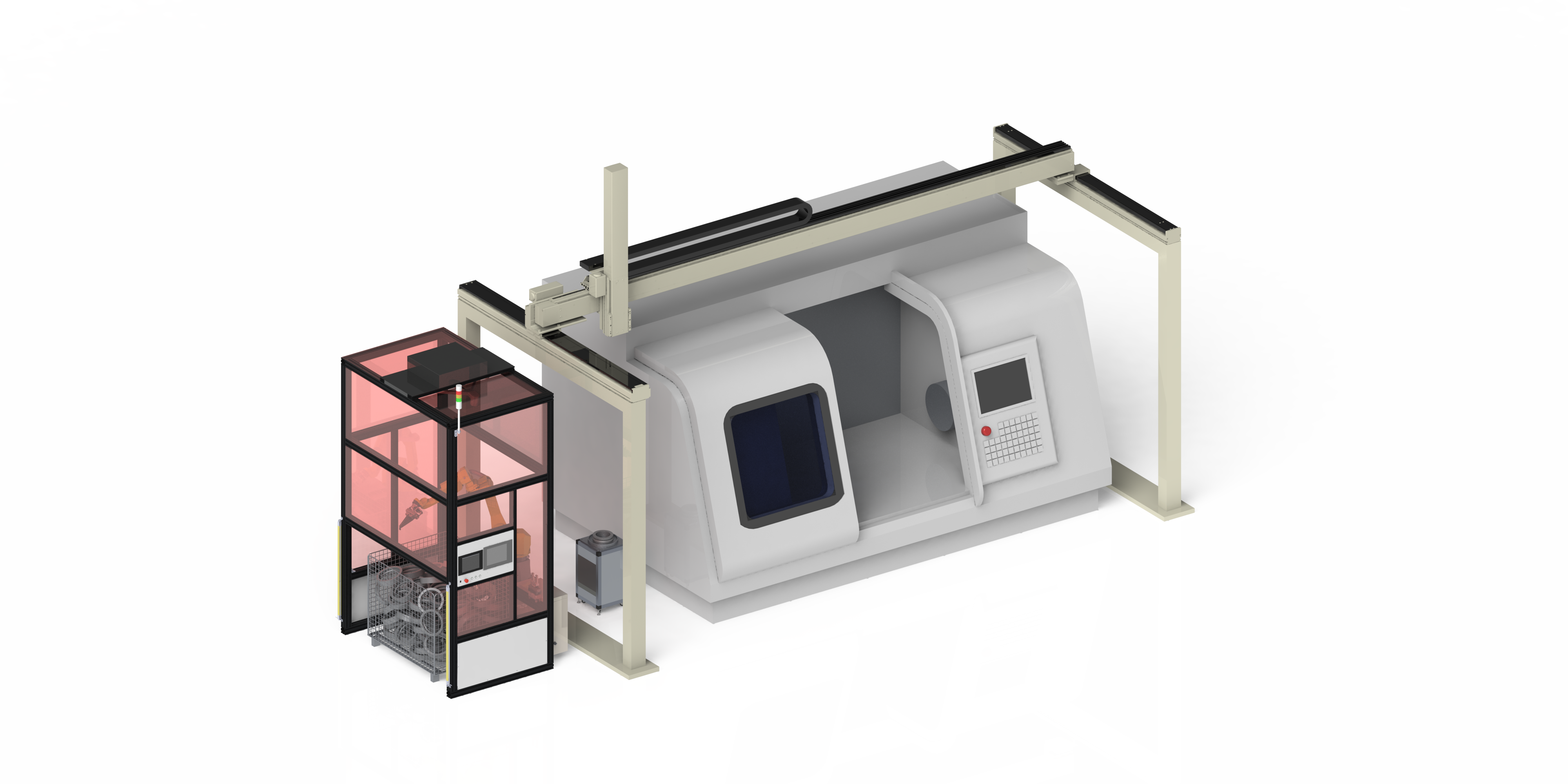
装置の動き
[事前準備]ワークの3DCADデータをビジョンシステムに登録する。
①ワークが入ったメッシュパレットを、カメラで認識できる位置にセット。
②認識エリア上部に取り付けられたカメラセンサで、ワークの位置と表裏を
1つ1つ認識。
③ロボットがワークをピックし、ガントリーローダーのピック位置にプレイス。
このとき裏向きのワークは反転機構で反転させる。
④既存設備のガントリーローダーが旋盤加工機へワークを共有する。