- Before
- 工場新設のため、ビフォー状態はなし。
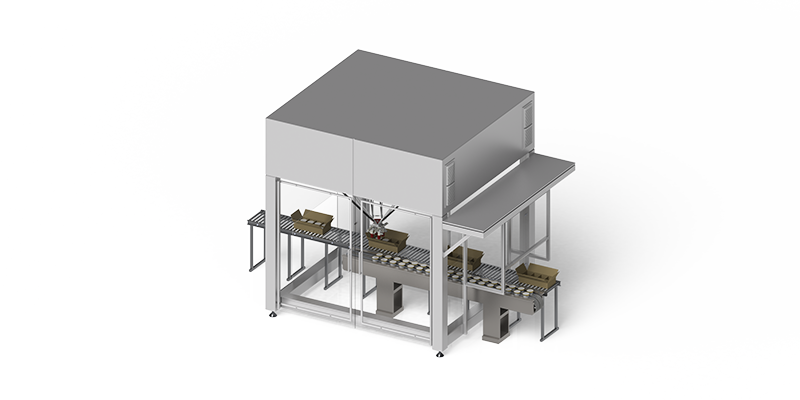
- After
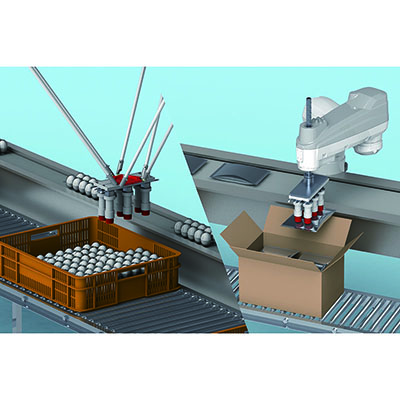
- ロボット1台でカップアイスを
6個x2段になるよう段ボールに箱詰め。
段ボールの内側には仕切りがあり、
1マスに1つx2段ずつ詰める。
| ワークの種類 | カップのアイスクリーム / 冷凍食品 |
|---|---|
| 納入先 | 乳製品メーカー |
| 工程・用途 | 段ボール詰め / 箱詰め |
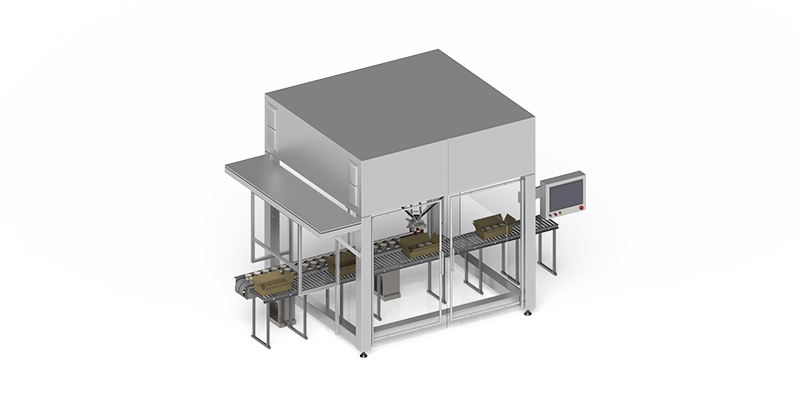
| プロダクト | パラレルリンクロボット搭載高速ピッキングシステム ロボットケーサー |
課題
段ボール内には仕切りがありカップと仕切りの間のゆとりが小さいため、カップが汚れたり破れたりしないよう正確な位置に搬送することが必要。
カップアイスがコンベヤで供給されるときのピッチと、箱に詰めるときのピッチが異なる。
ご提案
高速かつ高精度な搬送のため、パラレルリンクロボットを採用。
1段分のアイスクリーム6個をまとめてピック&プレイスできるオリジナルハンドを開発。
ピッチ可変であるため、ピック後に段ボールの仕切りの位置に合わせて間隔を調整して
プレイスする。
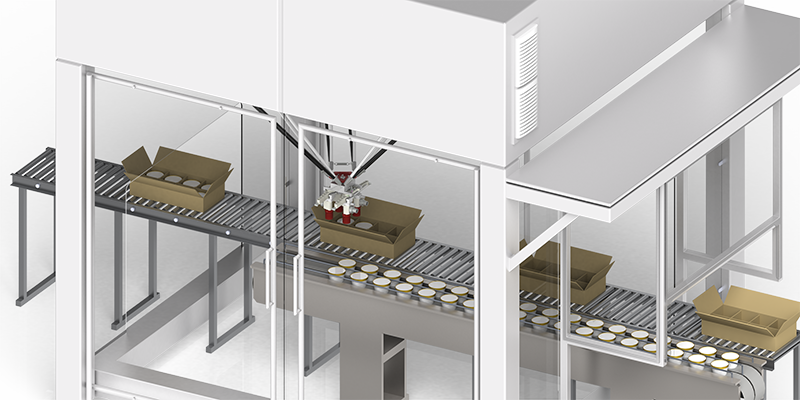
装置の動き
①カップアイスがコンベヤ上に2x3個ずつ並んだ状態で供給される。
②パラレルリンクロボットが、6個まとめて一気に吸着してピックする。
③段ボールの仕切りにぶつからないよう正確に箱詰め。
1箱に6個x2段で12個詰める。
④12個詰め終わった段ボールを、コンベヤで次工程の封函機に送る。