











パラレルリンクロボット搭載
高速ピッキングシステム
食品・医薬品などの製造工場を
中心に納入実績多数
現場で活きる「高速」を追求
パラレルリンクロボットの高速処理性能を最大限に発揮


※ 上記いずれもロボット3台、3個取り可変ピッチハンド使用時の実績値
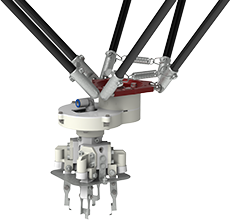
軽さを追求した多種多様なオリジナルハンドの設計
お客様のワークや工程に最適な独自のハンドツールを設計し、ご提供いたします。
アルフィスではハンドツールの「軽さ」を追求しており、それによりパラレルリンクロボットの高速処理性能を最大限に引き出すことを得意としています。
ハンド設計例これらの他にも 500 種類以上の実績がございます。
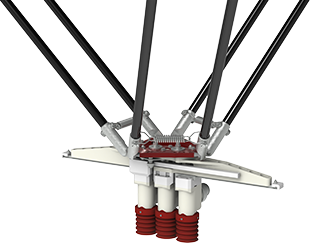
3個取り可変ピッチハンド
コンベヤ上を流れるワーク間隔が一定でない場合でも、吸着部の幅が可変のため、最大で3個一気にピックアップすることが可能

-

1個取り回転ハンド
-
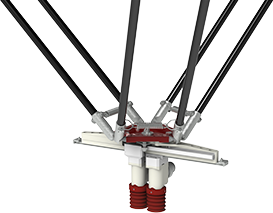
2個取り可変ピッチハンド
-
4つ爪チャックハンド
複数台パラレルリンクロボットで
高効率と省スペースを両立
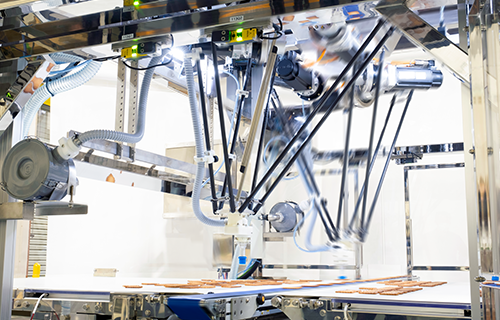
複数台のロボットが可動範囲を共有し、互いにぶつからないよう制御しながら高速で動作することが可能。狭いスペースに複数台のロボットを設置できるため、高効率と省スペースを両立します。
「バッファー機能」を搭載し、
チョコ停時のオーバーフローを防止

後工程でチョコ停が発生した際に、その信号を受けてワークを仮置きする「バッファー機能」を搭載。この機能により、製品を一時的にバッファーに逃がすことでオーバーフローを防止します。チョコ停の解除後にはバッファーからラインに戻すことで、ロスを削減できます。
世界初のデモレ社と国内独占パートナー契約
私たちは高速ピックアンドプレースの用途でパラレルメカニズムを世界で初めて商品化した「デモレ社」(スイス) の技術を用いたロボットシステムのライセンス供与を日本国内で唯一受けており、お客様に高い安全品質と技術力を生かした新しいソリューションシステムをご提案しています。
日本初パラレルリンクロボットを市場導入
私たちは1995 年(当時は日立精機として)、 日本で初めてパラレルリンクロボットを搭載した商品を市場導入しました。その後、エムテック、ボッシュパッケージングテクノロジー、シンテゴンテクノロジー、そして現在のJRC(ALFIS)と企業の変遷を経ながらも「パラレルリンクロボットの先駆者」として、四半世紀以上にわたり事業を継続しています。
食品・医薬品を中心に幅広い業界のお客様に選ばれ続けています。




アルフィス高速ピッキングシステムの
幅広い対応領域
未包装品のハンドリングから個包装品・完成品の
箱詰めまで、投入・整列・搬送など幅広い工程に対応可能です
-

未包装品を整列し次工程へ搬送
(プライマリー・ピッキング)
包装前の商品を直接ハンドリングする工程です。上流工程で個数が多いため、複数台ロボットでの高速処理が活躍します。当社は商品の吸着方法やカス処理方法など、豊富なハンドリングのノウハウを有しています。
- 工程例
- コンベア乗せ換え、整列、包装機へ投入、トレー詰め など
- ワーク例
- ラスク、せんべい、ラングドシャ、スポンジケーキ、マドレーヌ、カップ麺の具材(油揚げ、天ぷら)など
-

個包装品を箱・トレー詰め
(セカンダリー・ピッキング)
個包装済みの商品を箱・トレー詰めする工程です。箱やトレーの種別(入数)により、縦と横の個数が変わるため、お客様の仕様に合わせたソフトをご提供します。様々なパターン変更可能で多品種生産に向いています。
- 工程例
- トレー詰め、アソート箱詰め、カートナー供給、集積、逆ピロー包装 など
- ワーク例
- プライマリーピッキングと同様
-

完成品を出荷時の荷姿へ
(サード・ピッキング)
完成した商品を段ボール箱に詰め、出荷時の荷姿にする工程です。商品によっては 1 段ずつ詰め方を変える(互い違いにする)など、複数のパターンにも対応可能です。商品と一緒に合紙(あいし)を入れることもできます。
- 工程例
- 段ボール箱詰め、コンテナ詰め、通い箱詰め など
- ワーク例
- シリアル類、充填前の空袋、お菓子の大袋(袋・箱)、生めんの袋 など
食品業界以外への活用・納入事例
アルフィスの高速ピッキングシステムは、
食品以外にも様々な業界の「投入・整列・搬送」工程で多用途に活用されています。
- ウェットティッシュの蓋に
糊付け・貼付け

- ダイレクトメールに
サンプル品を投入

- 太陽電池をトレー詰め

- 絶縁テープに
剝離紙を貼付け

- ペットフードを
包装機へ投入
- PTP シートを
包装機へ投入
パラレルリンクロボットの活用例:引用元:産業用ロボットとは|はじめの工作機械
パラレルリンクロボットは、小さな部品のピックアップや、精密部品の組み立てで使われる産業用ロボットです。 複数のアームで一点を支えているため、位置精度が高く高速で稼働させることができます。出力が大きいため、簡単な金属加工やプレス加工にも利用することができます。
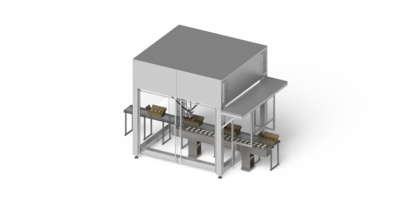
高速ピッキングシステムの製作例
標準仕様
| 外形標準寸法 (※) | W 1300 mm x D 1650 mm x H 2050 mm |
|---|---|
| 可動範囲 | φ1118 mm x H 330 mm |
| 可搬重量 | 3kg |
| 標準サイクルタイム | 30-120 サイクル/分 |
| トラッキング性能 | 80m/分 まで追従可能 |
| 消費電力 | 6 kVA 以上 |
| 消費エアー量 | 200NL/分~ |
※ロボット1台・制御盤込みの場合
-
製作例 ①個包装機供給装置
-
製作例 ②トレー詰め装置

運営者情報
- ALFIS(アルフィス)について
-
私たちアルフィスはベルトコンベヤ部品の国内リーディングカンパニーのである株式会社JRCの新規事業として2018年に生まれた、ロボットSIer(システムインテグレーター)の事業ブランドです。
中小企業をはじめとした、「製造業」と「研究ラボ」における人材不足、生産性・品質・精度の不安定さ、過酷・危険・煩雑作業の課題を、産業用ロボットや協働ロボットの活用によって解決し、確かな成果を挙げる「ロボット導入・ロボット化・自動化のトータルソリューション」をご提案します。
- 所属・認定
- 掲載
