
- Before
- 材料が入った様々な寸法の段ボールが
積まれたパレットから、作業員1名が
1日中手作業でデパレタイズを行う。
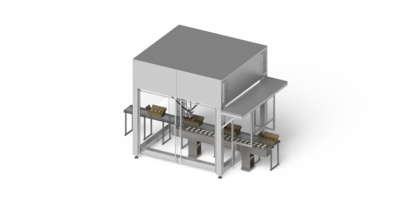
- After
- ロボット1台で自動でデパレタイズ。
空になったパレットは自動で排出し
積み上げる。
| ワークの種類 | ダンボール |
|---|---|
| 納入先 | 食品加工業者 |
| 工程・用途 | デパレタイジング |
| プロダクト | ロボットデパレタイズシステム |
課題
大きくて重い段ボールをパレットから降ろす作業は、作業者の負担が大きい。
労災の防止。
体力が必要な作業であるため人員確保が難しい。
ご提案
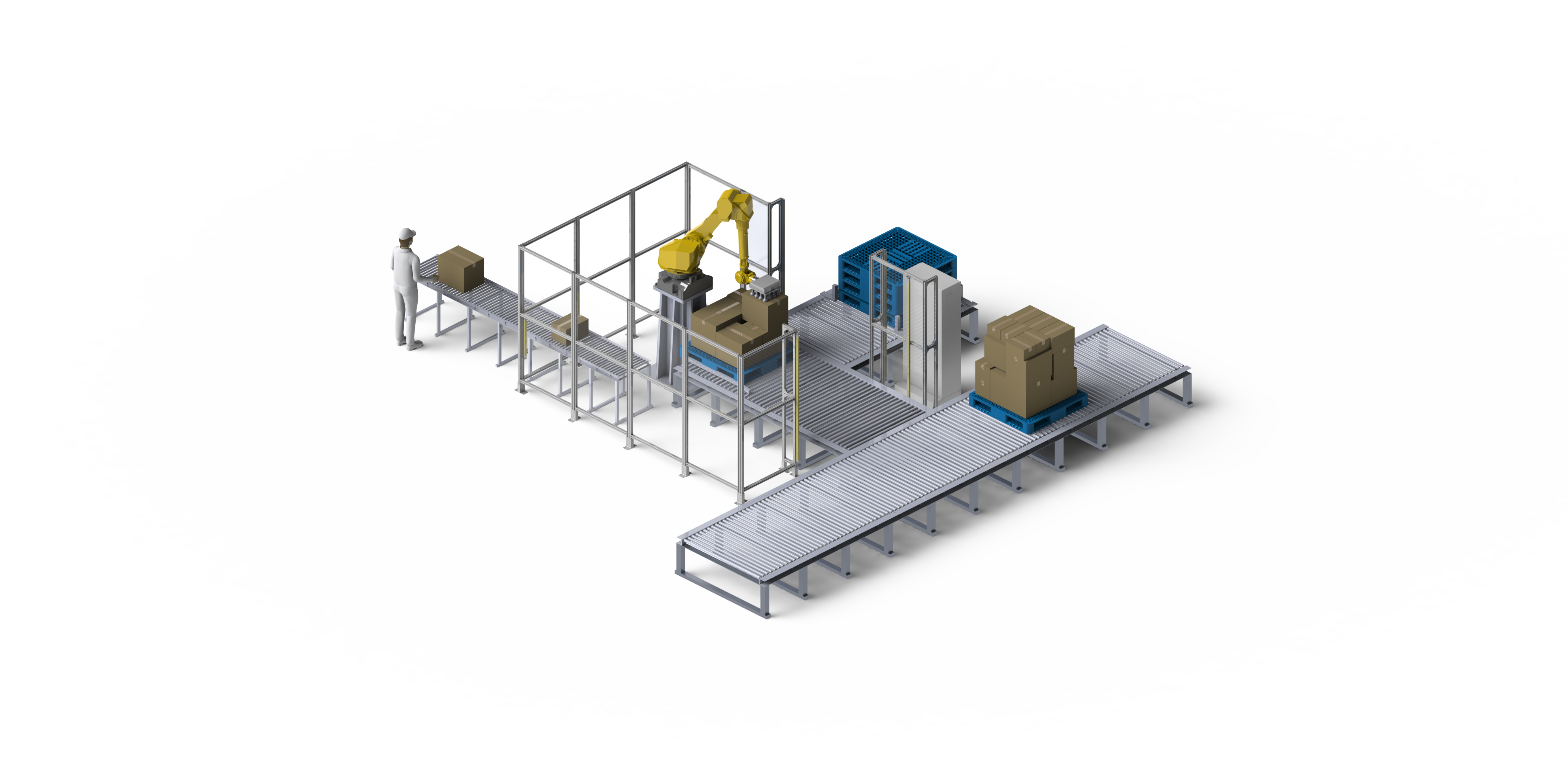
デパレタイズからパレット排出までの作業をロボット化。
人が行う作業は、ロボットの動作開始・停止時に簡単な操作を行うのみ。
3D ビジョンで段ボールのサイズを自動認識しデパレタイズするため、
単載・混載両方のパレットに対応可能。
ロボットの動き
①加工食品の材料が入った段ボールを積んだパレットが、ロボットのところまで
コンベアで運ばれてくる。
②パレット上部に設置されたカメラで段ボールの大きさ・高さを認識。
③ロボットが段ボールを1つずつピックし、次工程行きのコンベア上におろす。
④パレットが空になると、自動で排出し空パレットを積み上げる。
⑤空のパレットが一定数たまったら、作業者がリフトでパレット置き場へ運ぶ。