- Before
- シュリンク包装後のピザを、手作業で
3枚ずつ積み重ねて包装機に供給。
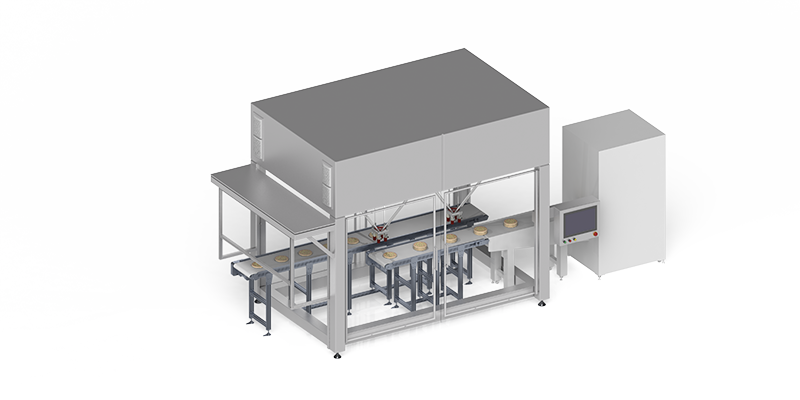
- After
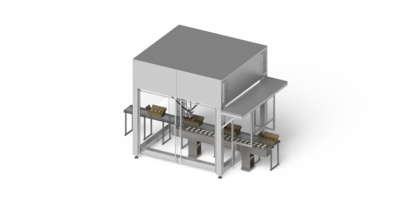
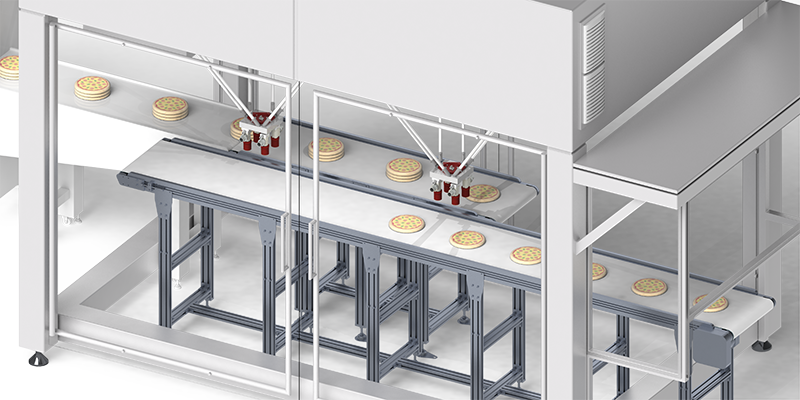
- パラレルリンクロボット2台で作業を
完全自動化。
包装機への供給コンベヤ上に、
ロボットでピザを搬送し積み重ねる。
| ワークの種類 | 1枚ずつシュリンク包装された冷凍ピザ |
|---|---|
| 納入先 | 冷凍食品メーカー |
| 工程・用途 | 大袋ピロー包装機への供給 / 積み重ね / コンベヤ載せ替え |
| プロダクト | パラレルリンクロボット搭載高速ピッキングシステム |
課題
製造ラインは24時間稼働であること、冷凍食品を扱う現場環境が寒いこと、工場の立地などの理由から、作業員の確保が非常に困難だった。
ピザのシュリンク包装は手で簡単に開封できる薄いものであるため、強く吸着すると破れたりしわが寄ってしまい、吸着させるのが難しい。
ご提案
小さな筐体にロボットを2台搭載し、省スペースに完全自動化を実現。
デリケートなワークに合わせて、専用のハンドツールを開発することで、製品の包装を破損させずにピック&プレイスを行う。
装置の動き
①冷凍ピザが前工程のシュリンク包装機からコンベヤで運ばれてくる。
②ロボットがピザを1枚ずつ吸着してピックする。
③後工程のピロー包装機への供給コンベヤ上にプレイスする。
この時、積んだ山が崩れないよう3枚ずつ正確に縦に積み重ねる。