- Before
- 縦ピロー包装機から流れてくる小分けパックの食品を、作業員2名が手作業で大袋ピロー包装機へ投入していた。
- After
- 包装工程の能力上昇に合わせて、高速で整列・投入ができるロボットを導入。
ロボット2台で完全に自動化し、2名分
省人化。
| ワークの種類 | 食品の小分けパック 重さ:500g |
|---|---|
| 納入先 | 食品メーカー |
| 工程・用途 | 包装機投入/コンベヤ載せ替え/搬送 |
| プロダクト | パラレルリンクロボット搭載高速ピッキングシステム |
課題
手作業での包装機投入は、500gの重量の食品を速いスピードで扱う重労働だった。
新しい包装機の導入に伴い生産能力が向上し、手作業での包装機投入では追いつかなくなってしまうこととなり、ボトルネック工程とならないよう投入速度を上げる必要がある。
前工程から等間隔に流れてくるワークを2行3段に積み、6個一気に包装する工程が自動化
しにくく、人手での作業に頼らざるを得なかった。
ご提案
コンベヤの構成を工夫することにより、限られたスペースで要求通りの積み方ができ、
更にコストパフォーマンスに優れた内容を提案。
縦ピロー包装機からの供給はばらつきが出やすいが、大袋ピロー包装機の停止を最小限に
抑え、装置停止によるオーバーフローを最小限に抑えるプログラムを実装。
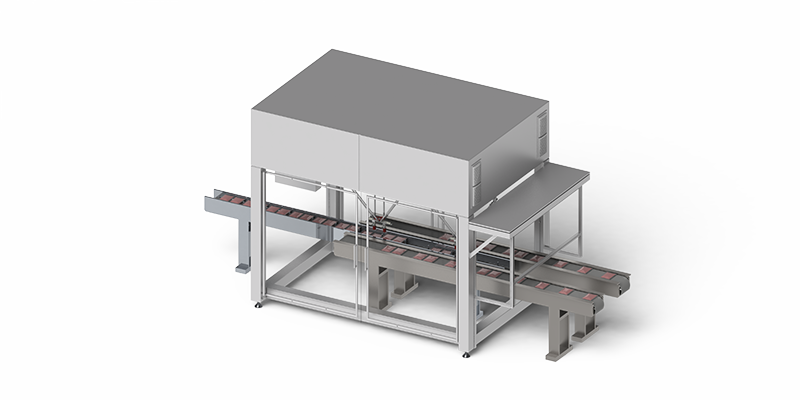
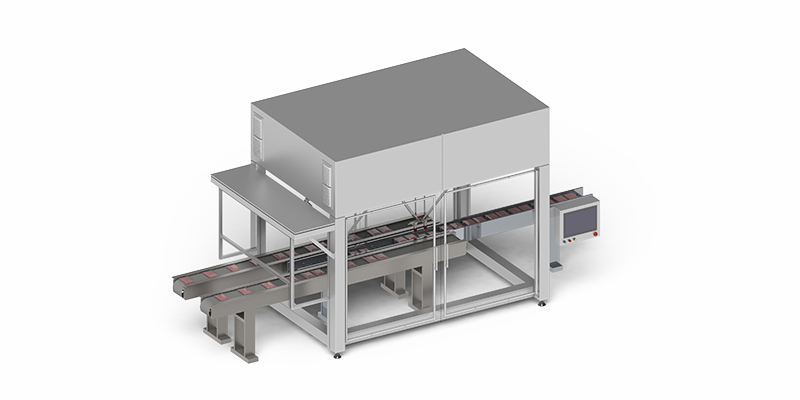
装置の動き
①縦ピロー包装されたワークがコンベヤで供給される。供給ラインは2ラインある。
②コンベヤを乗り継ぐ際に、ワークが2 つずつくっついて並ぶように整列する。
③ロボットがワークを2つ一気にピックし、大袋ピロー包装機の供給部へプレイスする。
3段ずつ縦に積み上げる。