












工場における作業のなかでも、高速・高精度が要求される工程を自動化する場合、汎用的なロボットアームでは対応がむずかしく、「パラレルリンクロボット」が検討されます。
この記事では、パラレルリンクロボットの構成と、パラレルリンクロボットの特徴・苦手とする作業などを解説します。
パラレルリンクロボットとは?
産業用ロボットの代表格といえる「ロボットアーム」は、人の腕の動きを再現できる汎用性の高さが特良です。しかし、複数のパラメータを調整する必要があるため、制御が複雑になりがちで、メンテナンスや修理の負担が大きくなる場合があります。
そこで、これらの課題を解決するために開発されたのが「パラレルリンクロボット」です。パラレルリンクロボットは天井から吊り下げる形で設置され、並列に構成された複数のリンクで一点を制御する「パラレルリンク機構」を採用した産業用ロボットです。
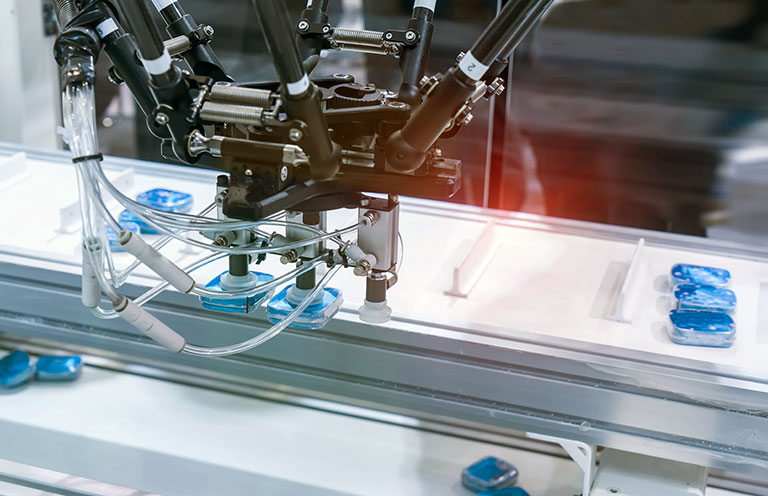
主な用途としては、ピッキング作業や組み立て作業があげられます。
パラレルメカニズムはベースから最終出力であるエンドプレートまでが複数のリンクで並列に連結されている機構を言う.
パラレルリンクロボットを搭載した「高速ピッキングシステム」の実績も多数あります。パラレルリンクロボットの選定・導入でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。

パラレルリンクロボットの構成
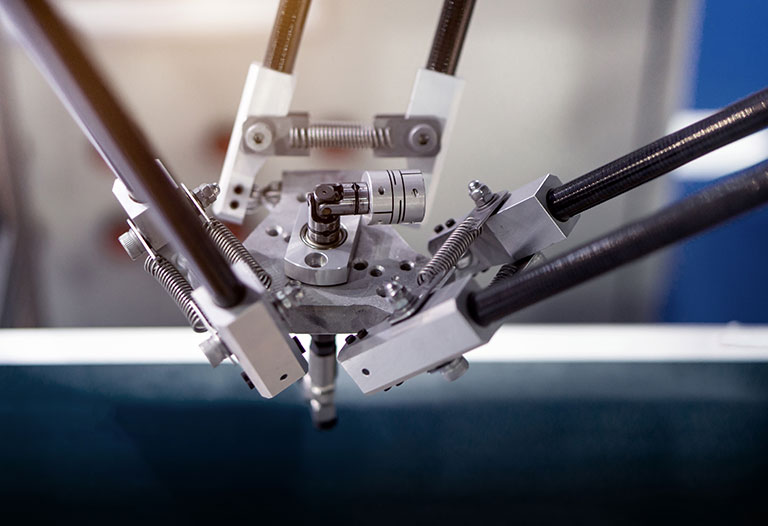
パラレルリンクロボットは、天井から吊り下げられている「ベース部分」、ベースに接続されたジョイントとの間をつなぐ「リンク部分」、リンクとリンクをつなぐ「ジョイント部分」に分類されます。
一般的なパラレルリンクロボットは、リンクを3セット並列に配置することで、先端部分の動きをコントロールしています。1セットのリンクは、2本のシャフトで構成されるのが一般的です。
パラレルリンクロボットの先端には、多くの場合ロボットハンドが取り付けられます。ロボットハンドは、用途に応じて変更することが可能です。
パラレルリンクロボットの特徴
パラレルリンクロボットには、さまざまなメリットがあります。
パラレルリンクロボットは、高速で精密な動作が可能
パラレルリンクロボットは、複数のリンクが並列に構成されているため、剛性が高いことが特徴です。また、それぞれのリンクに接続されているモーターで先端の一点を動かすため、高い出力で動かすことができます。
剛性が高いため、高速作動時にもリンク部分の変形が発生しにくく、高い精度を実現できます。
作業者の数倍以上のスピードで作業を行うことができ、生産能力を大幅に高めることが可能です。
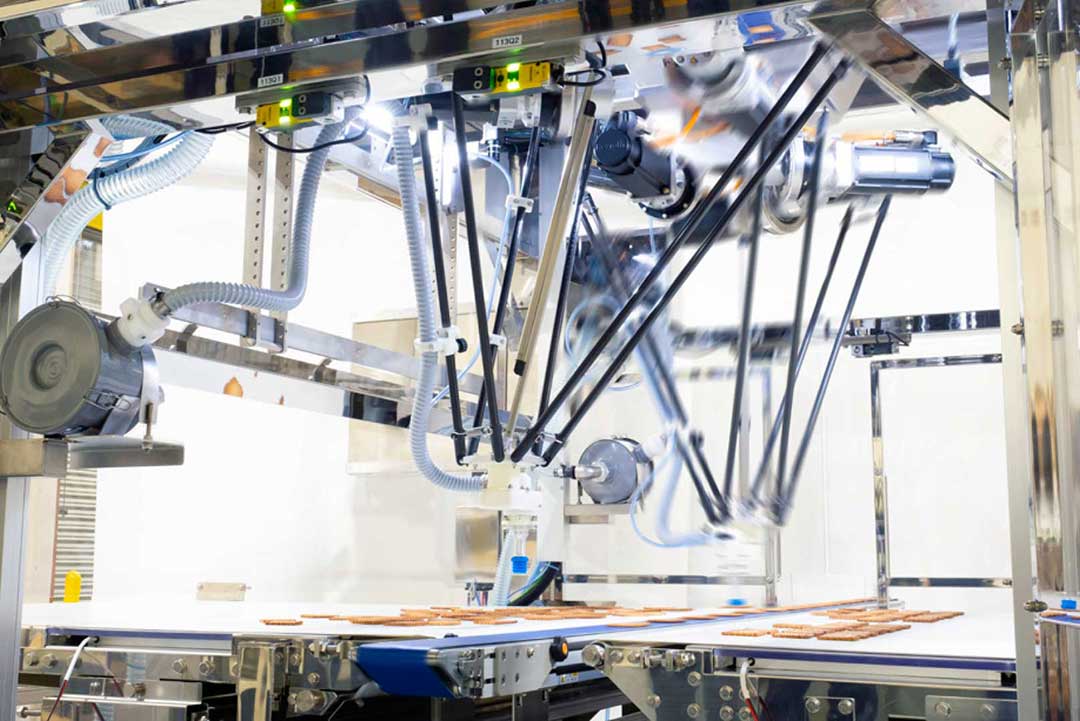
パラレルリンクロボットは、トラッキング性能が高い
パラレルリンクロボットは、その特徴から、ベルトコンベア上を流れる製品のピッキングでよく使われています。ほとんどのパラレルリンクロボットは、高精度のセンサーを搭載しており、高速で移動もできるため、高いトラッキング(追従)性能を誇ります。
コンベアを止めることなく、効率よくピッキングを行うことができます。
パラレルリンクロボットは、メンテナンスが容易
パラレルリンクロボットの構成はシンプルで、共通の部品が多く使われているため、メンテナンスも容易です。共通部品の採用により、交換用の在庫も抑えることができます。
(メンテナンスを行う際には、他の産業用ロボットと同様に専門知識が必要です)
パラレルリンクロボットが苦手とする作業
メリットの多いパラレルリンクロボットですが、万能というわけではありません。
選定に備えて、パラレルリンクロボットの苦手とする作業も把握しておきましょう。
パラレルリンクロボットは、作業領域が狭い
パラレルリンク機構を採用しているため、ロボットアームのように広範囲で作業を行うことができません。リンクから先端は、限られた範囲でしか移動できないため、作業領域はさらに狭くなっています。
その分、高速に動作することで高い生産性を実現しています。
パラレルリンクロボットは、可搬重量が小さい
パラレルリンクロボットは、構造がシンプルな反面、可搬重量が小さいです。パラレルリンクロボットの種類にもよりますが、可搬重量の上限は、1kg~10kg程度が一般的です。
より重いものを扱う場合は、並列しているリンクの本数を増やしたり、リンクの剛性やモーターの出力を上げる必要がありますが、コスト面や設置面積を考慮すると、あえてパラレルリンクロボットを選択する理由はなくなってしまいます。
パラレルリンクロボットの使用例
高速・高精度のパラレルリンクロボットの使用例を紹介します。
複数台のパラレルリンクロボットで、高効率と省スペースを両立
限られたスペースに、複数台のパラレルリンクロボットを導入。
それぞれがぶつからないよう協調して稼働できるよう工夫することで、省スペースを実現します。
パラレルリンクロボットの高速・高精度の特徴を活かして、生産性を大幅に向上させることが可能です。
ロボットハンドを付け替えることで、複数工程に対応
複数工程に、同種類のパラレルリンクロボットを導入。
複数のロボットハンドを付け替え、制御ソフトウェアを分けることで、共通のパラレルリンクロボットを使用たライン構築が可能です。
組み立て工程への導入で、高効率と品質安定を両立
経験が必要とされる精密組み立て工程に、パラレルリンクロボットを導入。
特定の作業者しかできなかった「属人化」した作業を自動化することで、生産性の向上と品質の安定化を両立します。
パラレルリンクロボットの導入は、ロボットSIer「アルフィス」にご相談ください
パラレルリンク機構を活用したパラレルリンクロボットは、高速・高精度な作業を得意としており、機構がシンプルなためメンテナンス性にも優れています。一方で、可搬重量が小さく、作業範囲も狭いデメリットもあります。これらの特徴を把握することで、自社の用途にあったパラレルリンクロボットの選定ができるでしょう。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、使いやすく・導入しやすい、高品質なロボットシステムをご提供しています。
パラレルリンクロボットを搭載した「高速ピッキングシステム」の実績も多数あります。パラレルリンクロボットの選定・導入でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。


