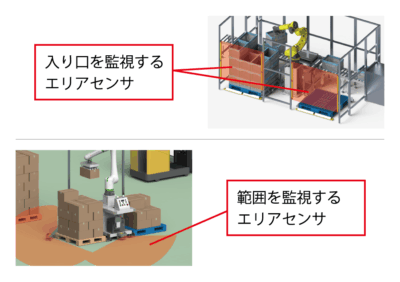
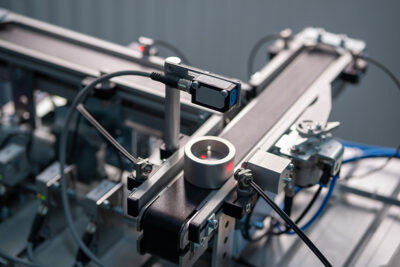
エリアセンサとは、設定したエリア内の物体を光や音波を使用して検知するセンサです。仕組みはシンプルですが、さまざまな用途や方式があります。...
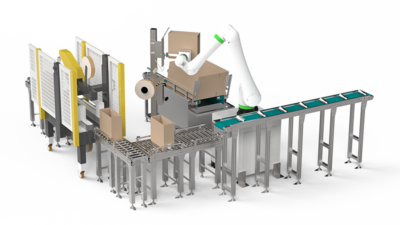
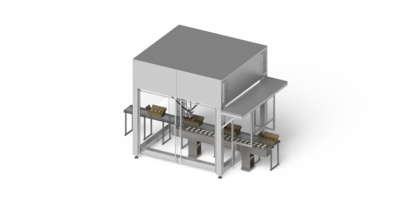
Before 作業員2名が段ボールの組み立て、底のI貼り、箱詰めを行い封函機で封函する。 After 協働ロボット1台で段ボールの組み立...
製造ラインの生産性向上や自動化を検討中のご担当者様に向けて、高速かつ精密な動作が可能なパラレルリンクロボットについて解説します。 この記...
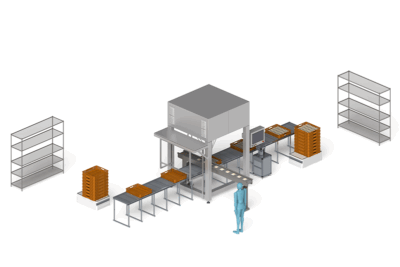
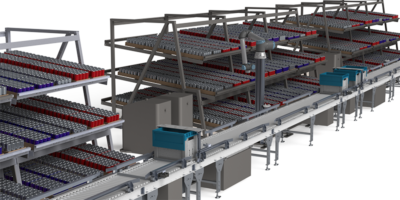
Before 空の番重を置き場から運んできて、製品を詰め、詰め終わった番重を次工程へ搬送する作業を、人手で行っていた。 After 積み...
Before 工場や倉庫に入荷したパレットから、 段ボール箱や袋などの重量物を 作業者1名が手作業で降ろしていた。 After ロボット...
「産業機械」とは、分かりやすくいえば工場の生産ラインで使用される機械の総称です。一般の生活で目にすることはほぼありませんが、さまざまな商...
物流業界では、作業効率や人手不足の解消が重要な課題であり、その解決策として注目を集めているのがピッキングロボットです。 この記事では、ピ...
Before パートタイマー複数人で、手作業で 小瓶をそろえてマルチ包装していた。予定生産数を確保するために、パートタイマー複数人で作業...
光電センサは光を利用したセンサのことで、その用途の広さから様々な場所で活用されています。 日常的な場面では「テレビやエアコンなどのリモコ...
Before 工場新設のため、ビフォー状態はなし。 After ロボット1台でカップアイスを6個x2段になるよう段ボールに箱詰め。段ボー...
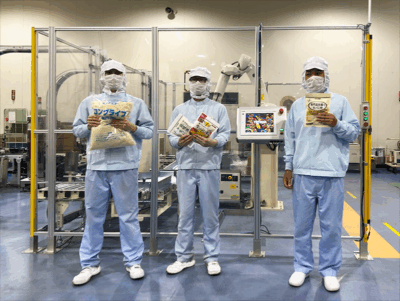
Before パン粉の袋に印字された日付・品種等を箱詰め作業者が目視で検査。封函機を通った段ボールを作業者1名が手作業でパレタイズ。 A...
Before コンベヤを流れる台紙の上にサンプル品を載せる作業を、2名で手作業で行っていた。 After パラレルリンクロボット1台で自...