- Before
- 1分間に67個のスピードで流れてくる
袋を1名が手作業で段ボールに詰めている。
- After
- ロボット1台で自動で段ボール詰め。
| ワークの種類 | 穀物類入りの袋(重量:400g) |
|---|---|
| 納入先 | 食品業界 |
| 工程・用途 | 段ボール詰め |
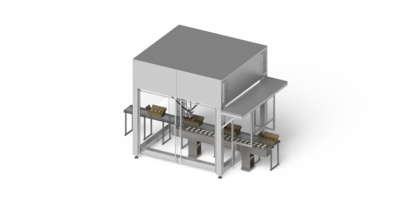
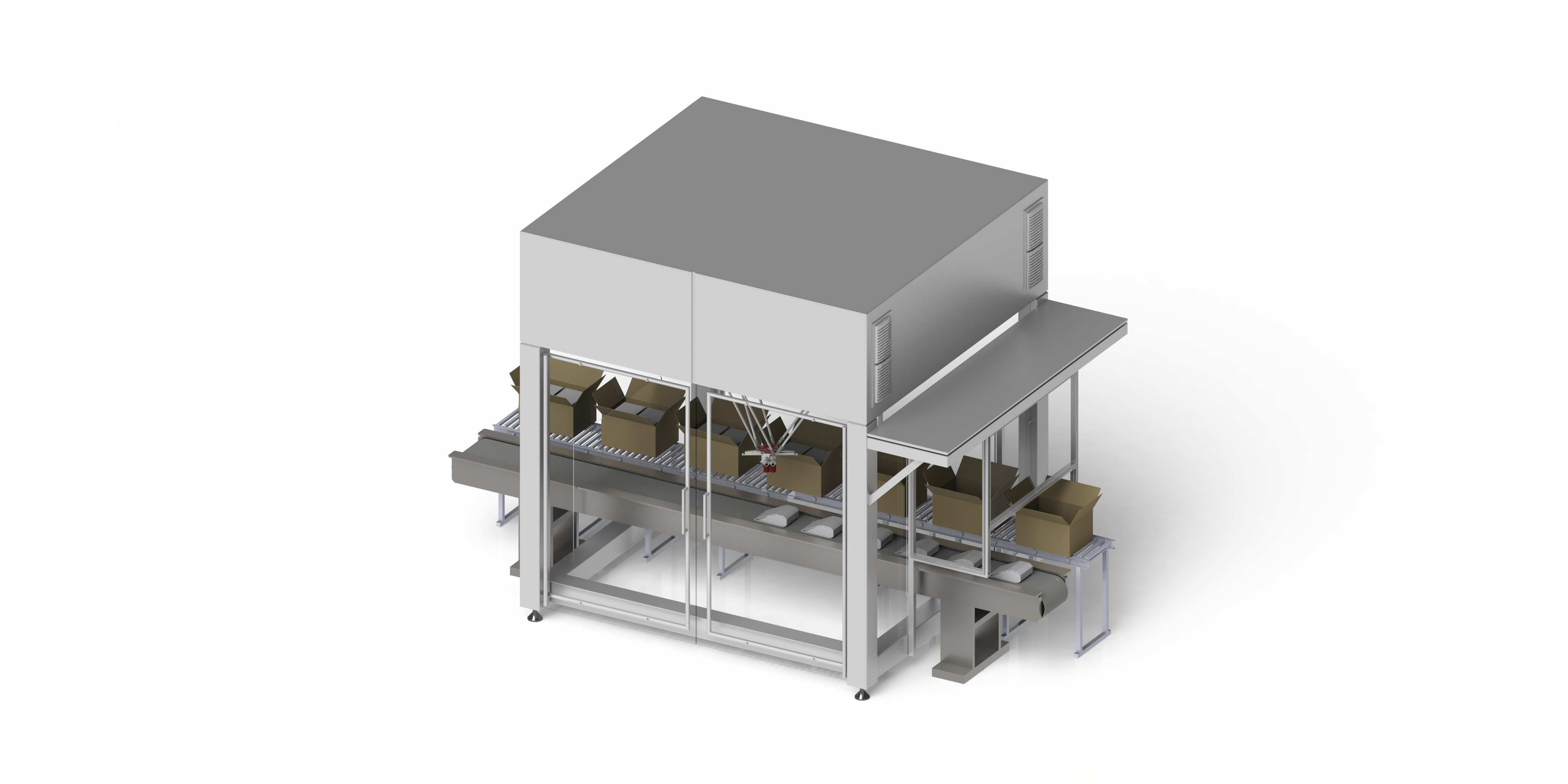
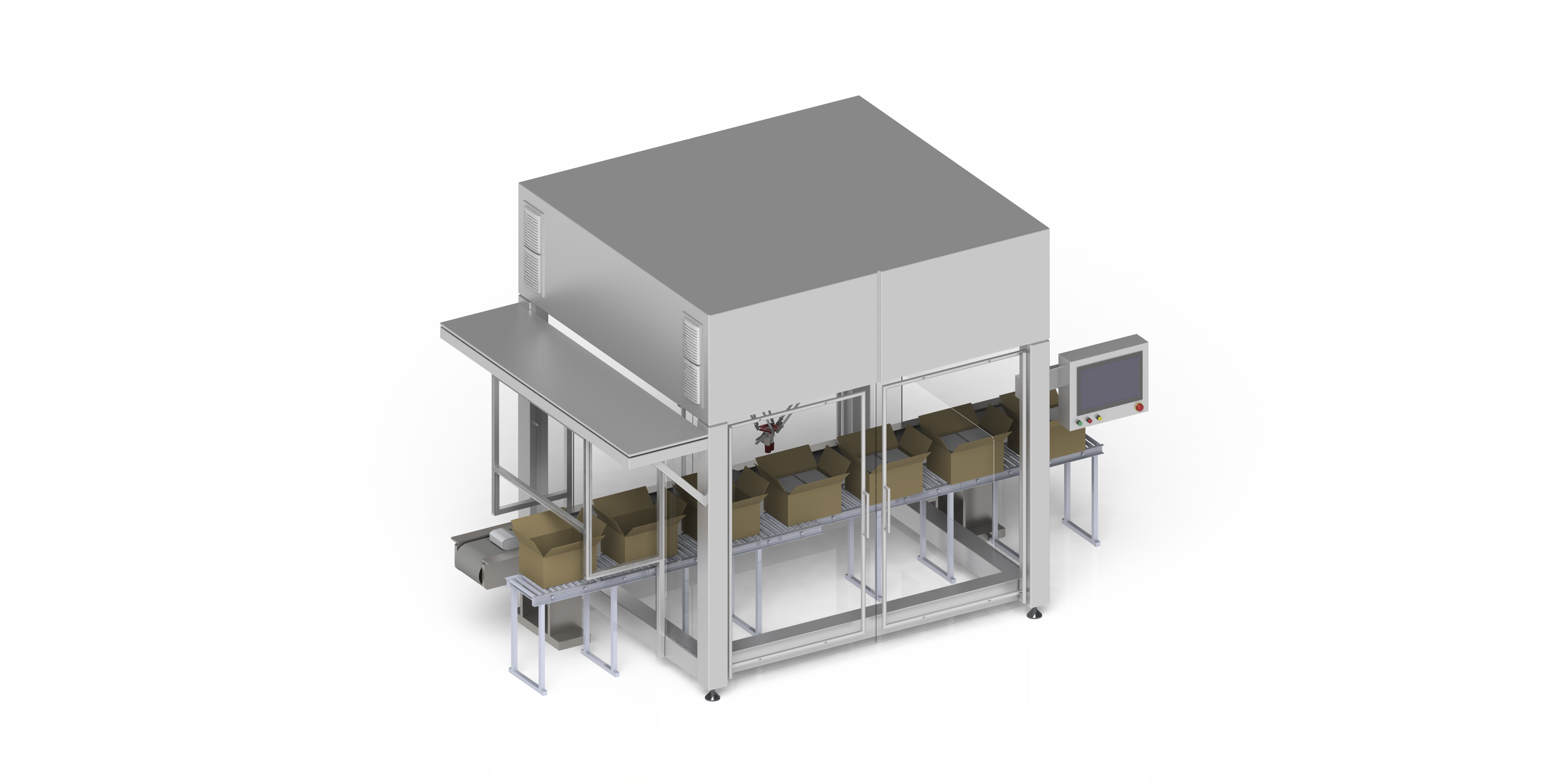
| プロダクト | パラレルリンクロボット搭載 高速ピッキングシステム |
課題
単純作業かつ夜間の作業もあり人材の確保が困難なので、自動化が必要。
ワークの重量が重く、搬送速度が遅くなる。
ご提案
2個取り回転ハンドを採用。ロボットを高速で動かせるよう軽量な設計。
ワークは底面はマチがあり上側は薄い形状をしているため、ハンドの回転によって
段ボールに互い違いの向きに詰めることで、段ボール内でワークが偏ることを防ぐ。
装置の動き
①給袋包装機からコンベアで、67個/1分の速度でワークが運ばれてくる。
②吸着の2個取りハンドでワークをピックする。
③段ボールへ1段2個x4段ずつ詰める。ピックした後のハンドが回転し、1段ごとにワークの
向きが逆になるように詰める。
④詰め終わった段ボールをコンベアで封函機に送る。