- Before
- 工場内で使用しているパレットから、
製品出荷用のパレットに、あるいは入荷時のパレットから工場内のパレットに、
作業者1名で手作業で積み替え。
- After
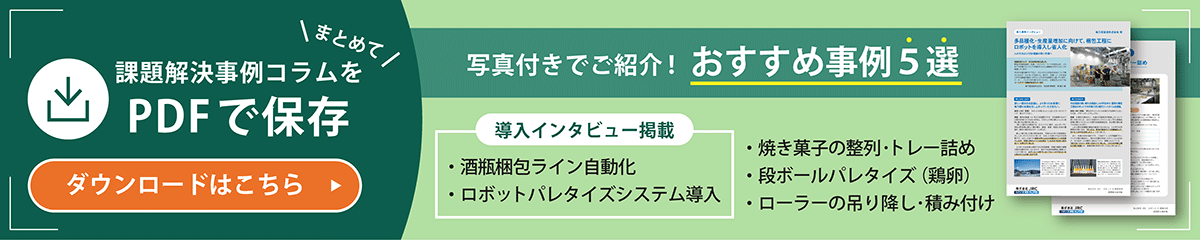
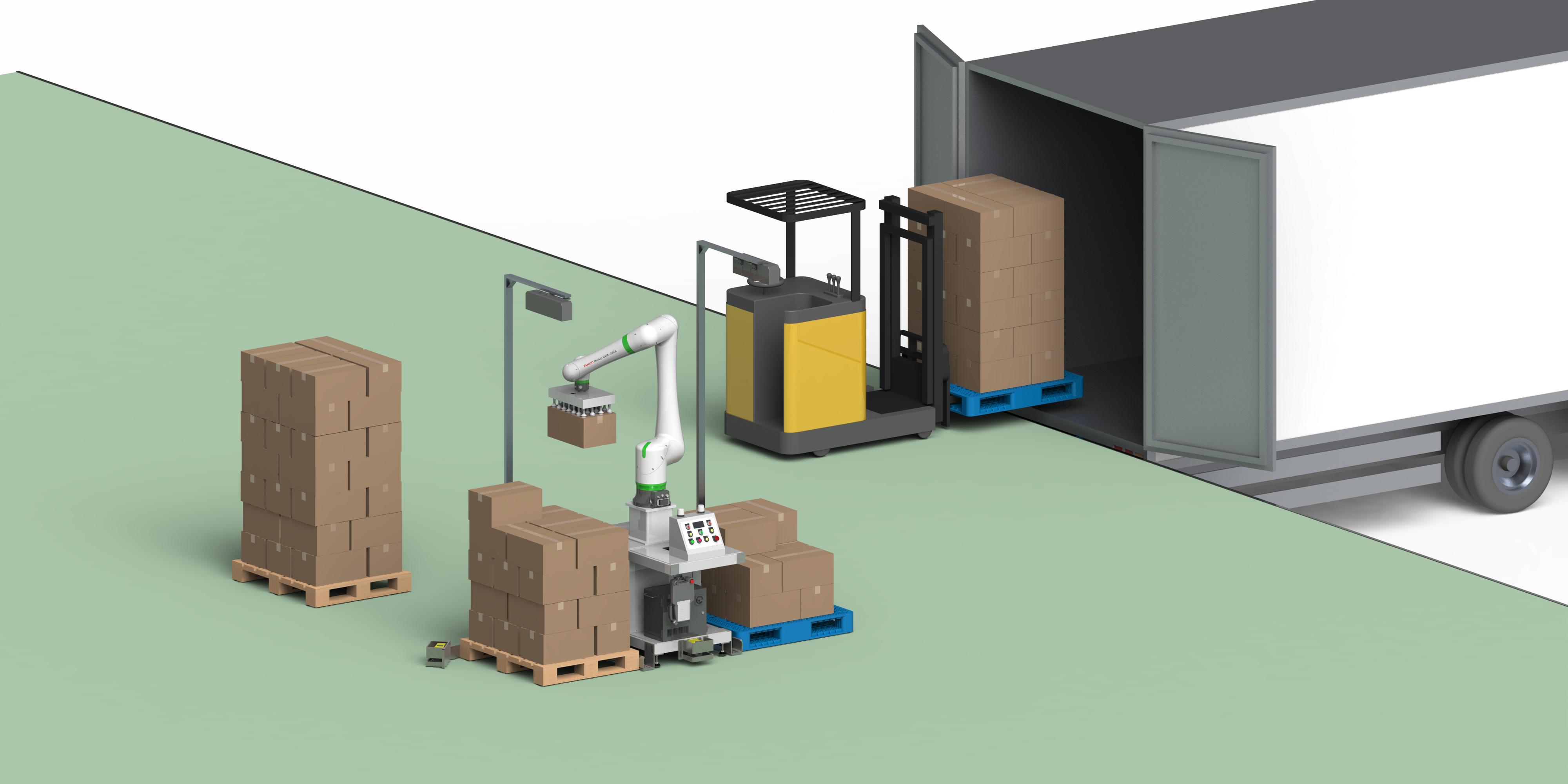
- ロボット1台で積み替え作業を自動化。パレットの交換のみ人がフォークリフト等で行う。
| ワークの種類 | 完成品入り段ボール |
|---|---|
| 納入先 | 包装資材メーカー |
| 工程・用途 | パレットの載せ替え/パレタイジング/デパレタイジング |
| プロダクト | ロボットパレタイズシステム/ロボットデパレタイズシステム |
課題
パレットからパレットへ積み替えるだけの単純作業だが、重い段ボールを扱うため
作業員の負担が大きい。
パレットが出入庫するたびに発生する作業であり、作業時間が長い。
パレットチェンジャーは大きすぎて導入が難しい。
ご提案
パレタイズとデパレタイズの両方の作業を行えるロボットシステムを導入し、
積み下ろしと積み付けを1 台で行う。
従来の作業スペースは人やフォークリフト等の移動があり、安全柵を設置すると
導線が塞がるため、安全柵を省いたフットプリントの小さい装置を設計し、
3台のエリアセンサで360度監視することで安全を確保。
装置の動き
①満載のパレットと指定の空パレットを、それぞれ所定の場所に設置。
②ロボットを操作し、積み替え作業を開始。
③パレット位置の上部に取り付けたカメラでそれぞれのパレットの積み付け状態を認識し、
ロボットが段ボールをピックして指定パレットにプレイス。
④積み替えが完了次第、空のパレットと満載のパレットを作業者がフォークリフト等で
取り出す。