- Before
- パレットで入荷した原材料を手作業で
デパレタイズし、コンベヤで加工工程へ搬送。作業員1~2名で作業を行って
いる。
- After
- ロボットパレタイズシステム1台を
導入し、入庫した原材料のほぼ全ての
パレットを自動でデパレタイズ可能に。ロボットを操作する作業員1名で作業
可能。
| ワークの種類 | 段ボール箱/紙袋/ナイロン袋 など |
|---|---|
| 納入先 | 食品メーカー |
| 工程・用途 | デパレタイジング |
| プロダクト | ロボットデパレタイズシステム |
課題
入庫した原材料をパレットから降ろす工程で、材料によって入荷時の荷姿が様々であるため、
作業が複雑で自動機の導入が難しい。
高く積まれた重い原材料をデパレタイズする作業は負担が大きく、労災発生の危険性もある。
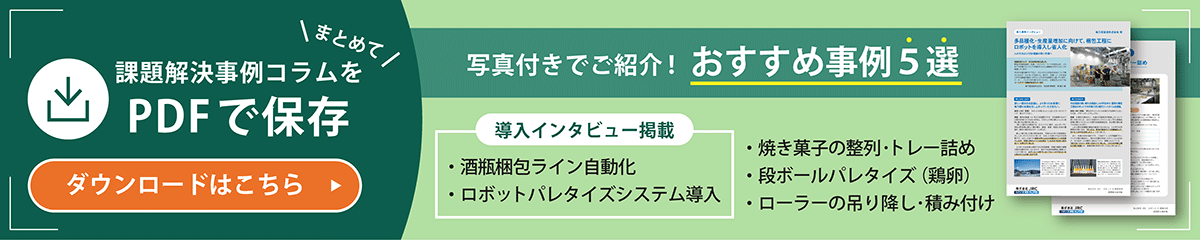
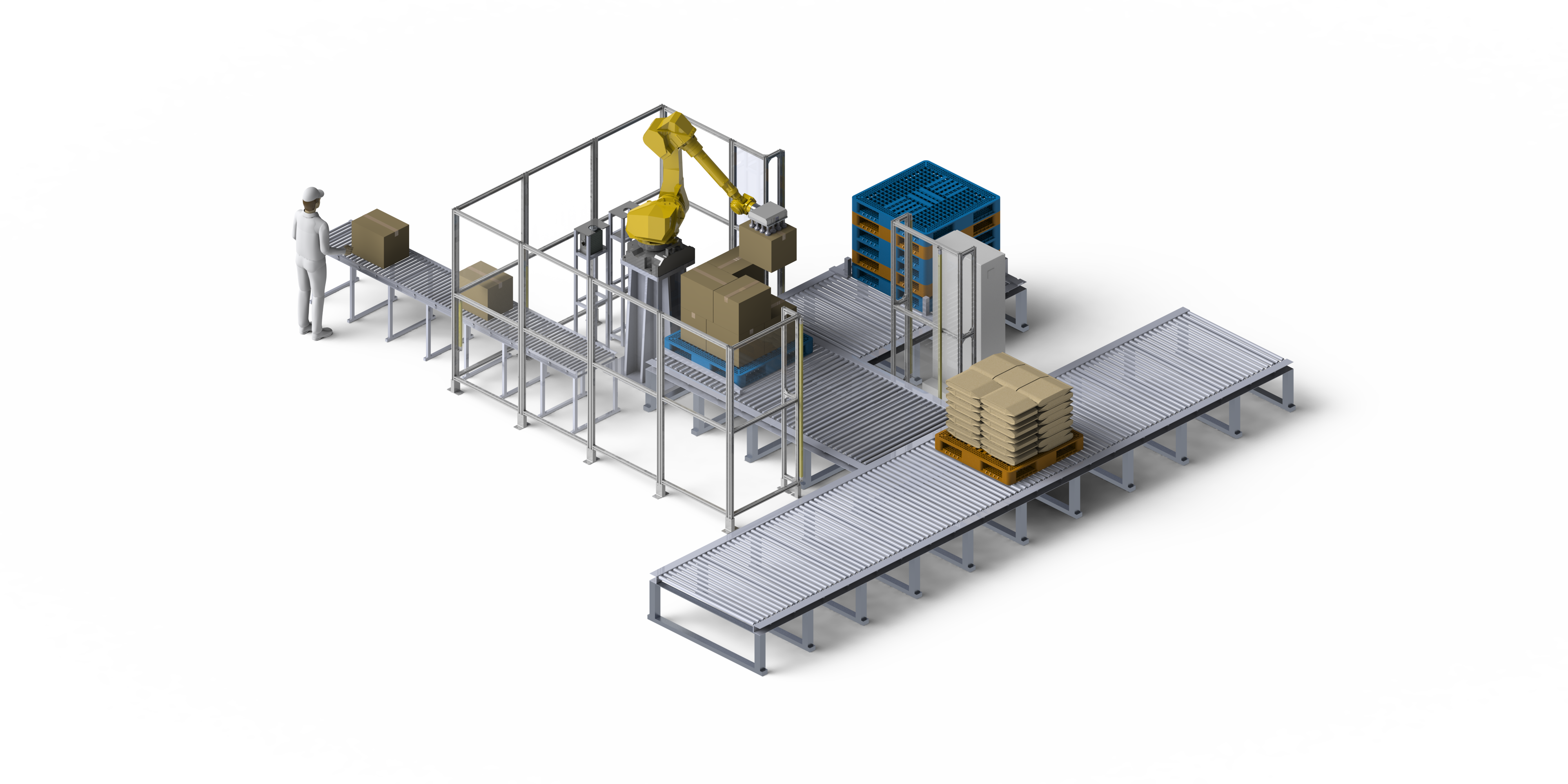
ご提案
高性能なビジョンシステムで認識し、自由度の高い6軸ロボットでピックする構成の装置を
使用することで、様々な形状の材料のデパレタイズを1台の装置で行う。
品種登録が不要で、3Dビジョンが自動でワークの位置とサイズを認識してデパレタイズ
するため、材料や梱包形態の変化に柔軟に対応できる。
装置の動き
①入庫したパレットがコンベヤでデパレタイズシステムまで運ばれてくる。
②ロボットがワークを自動でデパレタイズ。
③空パレットを所定の位置まで排出。一定量たまったらコンベヤでまとめて排出。
※ワークのサイズが大きすぎるなど、デパレタイズしないパレットは、
パレタイズ装置に送らないで手作業の工程に流す。