
- Before
- 切削加工後の金属部品を洗浄機へ
投入し、洗浄後に取り出す作業を、
作業者1名が手作業で行っていた。
- After
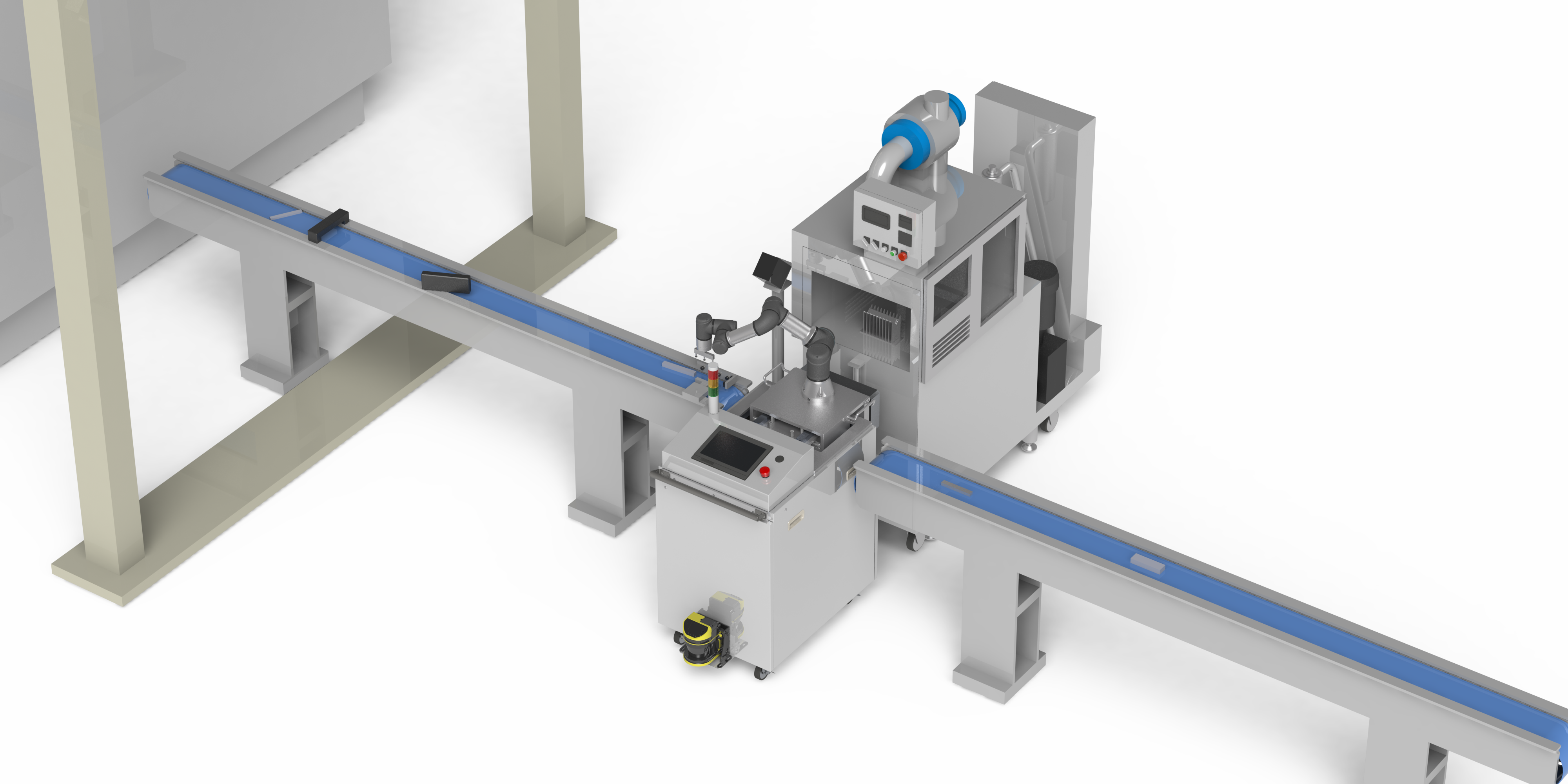
- 金属部品をコンベヤで洗浄機まで運び、カメラセンサで認識して協働ロボットでワークを投入する。人の作業はロボットの運転・停止操作のみになり、作業者は別作業を行うことが可能に。
| ワークの種類 | 切削加工後、あるいは切断後の金属部品・金属材料 |
|---|---|
| 納入先 | 金属加工業者 |
| 工程・用途 | 洗浄機への部品投入・取り出し |
| プロダクト | 移動式・協働ロボットユニット Robogie(ロボギー) |
課題
切削加工や切断後の部品には切粉が付着していたりバリがあったりするため、
作業者が触れてしまい負傷するおそれがある。
さらに、金属部品は小さくても重く、肉体的な負担の大きい作業でもあるため、
労災防止のために自動化をしたい。
部品の形や大きさはさまざまなものがあるため、幅広く対応できる装置が必要。
ご提案
コンベヤ上にカメラセンサを設置し部品の大きさや位置を認識して、協働ロボットが
部品をつかんで洗浄機へ投入する装置を提案。
協働ロボットは安全柵で囲わずに稼働できるため、もともと人が作業していたスペースに
そのまま設置が可能。
架台にキャスターがついているため、ロボットを使用しないときは移動させてスペースを
あけることができる。
装置の動き
①金属部品がコンベヤで洗浄機まで運ばれてくる。
②コンベヤ上に設置されたカメラセンサが、部品の向き・大きさ位置を認識。
③カメラの認識情報をもとに、協働ロボットが部品をピックして洗浄機に設置し、
設置完了の信号を洗浄機に送る。
④洗浄が完了し、ロボットが完了の信号を受け取ると、洗浄機から部品を取り出し、
次工程に送るためのコンベヤ上に置く。