











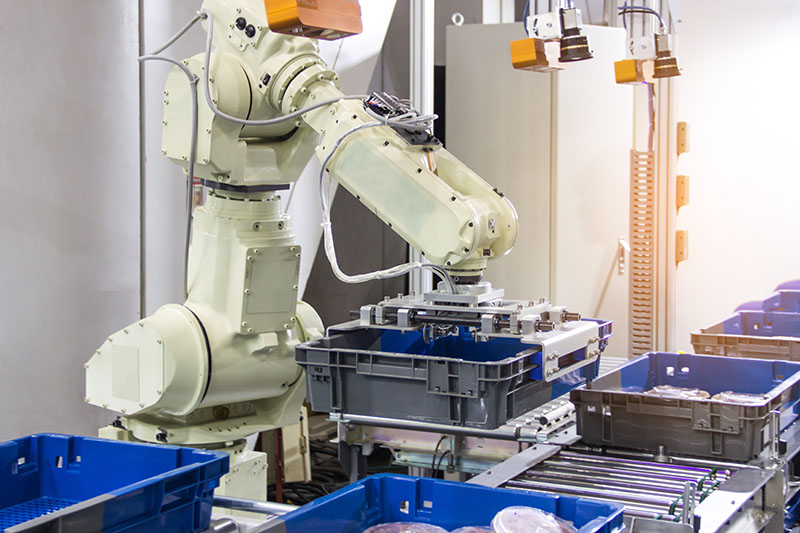
産業用ロボットの先端に取り付けワークをつかむパーツを「ロボットハンド」あるいは「エンドエフェクタ」と呼び、ワークのつかみ方にはワークを2本以上のつめで挟んでつかむ「把持型」とワークを吸着してつかむ「吸着型」の2種類があります。

本記事では、把持ハンドの特長について詳しく解説いたします。
把持ハンドをつかったロボット化でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。
ロボットシステムに把持ハンドを使用するメリット・デメリット
把持ハンドとは、ハンドの先端に取り付けられた「つめ」が開閉することで、ワークを挟んで持ち上げるハンドツールです。
把持ハンドを使用するメリットとデメリットを紹介します。
ロボットシステムに把持ハンドを使用するメリット
把持ハンドは、吸着ハンドと比較して以下の様なメリットがあります。
■ 様々な形状・材質のワークを持つことができる
吸着ハンドの場合は、吸着することができる平たい面が必要です。穴の開いた形状のワークや、布などの空気を通す素材のワークは持ち上げることができません。
把持ハンドは爪で挟むことが出来さえすれば持ち上げられるため、さまざまな形状や材質ワークに柔軟に対応できます。
■ 強い保持力がある
小さいハンドでも強い保持力を持たせることができるため、吸着ハンドよりも重いものを持ち上げることが得意です。
ロボットシステムに把持ハンドを使用するデメリット
把持ハンドは、吸着ハンドと比較して以下の様なデメリットがあります。
■ 動作に時間がかかる
把持ハンドは持つとき・はなすときに毎回つめを動かす必要があるため、一瞬で吸着したりはなしたりできる吸着ハンドと比べると、サイクルタイムが長くなってしまう傾向があります。
■ 表面に摩擦が必要
つめで直接挟んで固定する構造のため、つるつると滑る表面のワークの場合、保持力が落ちてしまいます。
ロボットシステムに使用するエアー式把持ハンドと電動式把持ハンド
把持ハンドの先端のつめを動かす方法には、空気圧で動かす方法と電動で動かす方法の2種類があります。
エアー式把持ハンド
エアー式の把持ハンドは、コンプレッサ等から送られるエアーの圧力を用いてつめの開閉を行います。電動式の場合と比較してハンド部分が軽量であり、大きな把持力を持つ機種も多いため、重いワークの搬送に適しています。
電動式把持ハンド
電動式の把持ハンドはコンプレッサー等の設備が要らず、電力を供給するだけでワークを把持することが可能です。ハンドツールへのエアー配管が不要なので、ロボットシステムがエアー式把持ハンドよりもシンプルに構成できます。騒音やスペース等の都合でコンプレッサーが設置できない場合にも、電動式が採用されます。
ロボットシステムに把持ハンドを使用する際の把持方法
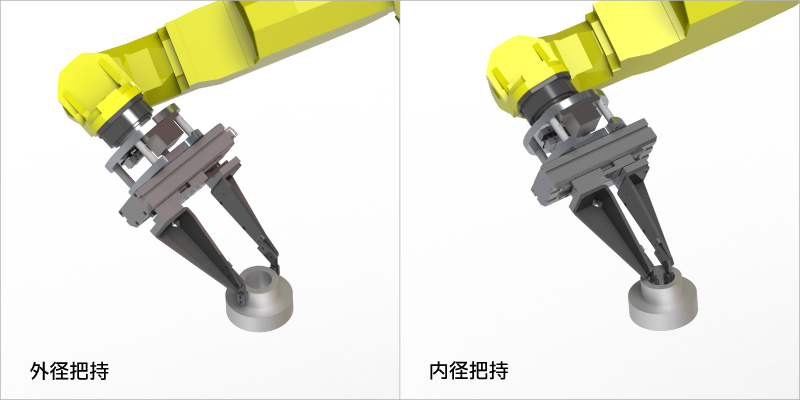
把持ハンドがワークを持ち上げる方法には以下の2種類があります。ワークの形状や供給時の姿勢などによって、よりつかみやすい方法を選びます。
外径把持(ピンチ把持)
外形把持とは、ワークを外側から挟んでつかむ把持方法です。内径把持はつめを差し込む穴がないとワークをつかむことができませんが、外形把持の場合は内径把持よりもより幅広い形状のワークに対応することができます。
一方で、他のワークと重なる場合やワークのすぐそばに壁がある場合など、ワーク供給方法や姿勢によってはつめがつかみたい位置に届かず、つかむことができなくなることがあります。
内径把持(インサート把持)
内径把持とは、ハンドのつめ部分をワークの穴の部分に差し込んでからつめを外側に広げ、穴の内側の壁をつかむ把持方法です。
上の図のフランジのように上下の両面に穴があるワークでは、内径把持のほうが外径把持よりもつかみやすい場合があります。
把持ハンドに取り付けるつめの材質
把持ハンドでワークに直接触れるのは、つめの部分です。ワークや工程によって使用できる材質が異なります。
重さや価格、強度、水や薬品への耐性など様々な条件から、適切な材質の物を選択して設計します。
金属
把持ハンドのつめとしてよく使われる金属素材は、スチール・ステンレス・アルミニウムなどがあります。強度と耐久性が高く、重いワークや固いワークを持つときに使われます。
樹脂などと比較すると重い素材であるため、ハンドツール自体の重量が大きくなってしまうことが、金属のデメリットです。ロボットごとに可搬重量は決まっていて、ハンドツール等の付属品とワークの合計が可搬重量を越えないようにする必要があるため、ハンドツールの重量を小さく抑えることは重要です。
樹脂
把持ハンドのつめに用いられる樹脂素材は多岐にわたりますが、強度と価格等を考慮して汎用エンジニアリングプラスチック類がよく使われています。(例:ポリアセタール、MCナイロン など)
金属より軽いため、小さく軽いワークの場合によく使用されます。
ゴム
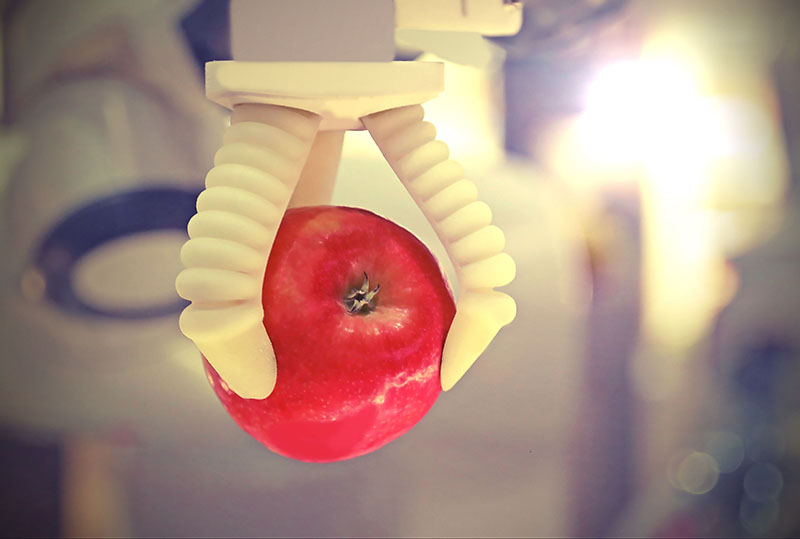
食品のように形状が不均一なワークや柔らかく壊れやすいワークをつかめる把持ハンドとして、つめ部分にゴムが使われているハンドが開発されています。
柔らかなモノをそっと包む手、複数のモノを持ち、多種多様なモノをつかむ手。
可能にしたのは、ブリヂストンのゴム人工筋肉「ラバーアクチュエーター」。
「強さ」と「柔らかさ」を兼ね備えたゴム人工筋肉の指を持つ“第3の手”を開発しています。
引用元:BRIDGESTONE Softrobotics Ventures
つめそのものがゴム素材でできている場合と、金属製のつめにゴム手袋のようにカバーをかぶせたり、一部にゴムシートを張り付けたりしている場合があります。
ゴム素材の柔軟性によりワークにフィットさせたい時だけなく、滑り止めとして採用されていることもあります。
ロボットシステムの導入は、ロボットSIer JRC【ALFIS】にご相談ください
産業用ロボットではさまざまなワークを扱うため、それぞれのワークに適したロボットハンドの選定が必要です。ロボットハンドを選ぶ際には、ワークの材質や重さ、表面の状態、やわらかさなどを考慮する必要があります。また、信頼性や制御精度を考慮することで、自社の生産性向上や人手不足解消を実現できるでしょう。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、使いやすく・導入しやすい、高品質なロボットシステムをご提供しています。
ロボットハンドの選定でお困りでしたら、ぜひ一度、下記問い合わせフォームよりお問い合わせください。


