












工場の現場では、ロボットアームやパラレルリンクロボットなど、さまざまな産業用ロボットが活用されています。それらのロボットに接続し、実際にワークをつかむのが「ロボットハンド」です。
この記事では、ロボットハンドの種類やそれぞれの特徴、ロボットハンドを選定する際のポイントについて解説します。
ロボットハンドは、人の手や指の役割をこなす
ロボットハンドは、産業用ロボットの先端に接続し、人間の手の代わりをする部品です。人間の手のように5本指のハンドも開発されていますが、ほとんどの場合、扱うワークにあわせて必要な本数で設計されているため、2本指や3本指のものもあります。
また、ワークをつかむのではなく吸着するタイプのハンドや、加工や溶接をそのまま行えるよう工具が装着されているものもあります。近年は、複数種類の製品を共通のロボットハンドで扱えるような、汎用性の高いロボットハンドも開発されており、多品種少量生産に対応することが可能です。
適切なロボットハンドを活用することで、生産性や品質向上だけでなく、新しい生産ラインを短期間で立ち上げることも可能です。
ロボットハンド
人間の腕に相当するロボットアームの被支持端部に取付けられ,ひとの手の役目を果たす.ロボットハンドは大きく二つのタイプに大別できる.一つは,オン・オフ開閉式のグリッパで,もう一つは多指・多関節ロボットハンドである.
三品産業でのロボットハンドの選定でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。

ロボットハンドの種類と特徴
ワークを直接扱うロボットハンドは、主に「把持型」と「吸着型」に分類することができます。ワークの種類や状態に応じて、使い分けがされています。
把持型のロボットハンド

「把持型」は、人間の手のように複数の指でつかむロボットハンドです。指の本数は、2~4本のものが一般的です。さまざまな形状・素材のワークを扱うことができ、つかむ力が強いものは加工工程でワークを固定することも可能です。
指の部分を動かす駆動力には、「電動」のものと「空気圧」のものがあります。
電動型(ロボットハンド)
「電動型」は、ワークをつかむ位置を連続的に設定することができ、共通のロボットハンドで、サイズや向きが異なるワークを扱うことができます。
また、空気圧型に比べると、エア供給用のホースやコンプレッサが不要で、シンプルな接続構成が可能です。
空気圧型(ロボットハンド)
「空気圧型」は、コントローラが不要なため導入初期の設定はスムーズです。また、展開されているバリエーションが多岐にわたるため、目的にあった種類が見つかりやすいこともメリットです。
ロボットハンド自体が軽量なため可搬重量を活かすことができ、特に重いワークを扱う際に用いられています。
吸着型のロボットハンド

「吸着型」は、ワークを吸着し運ぶロボットハンドです。把持型のように、指を動かす必要がないため、ワークをつかんだり離したりする速度が速い点が特徴です。一方で、使用していくなかで、吸着力が低下してしまうことがあり、把持型よりも頻繁なメンテナンスが必要になります。
吸着型のロボットハンドは、吸着をする際の仕組みから、「真空型」と「磁力型」に分類できます。
真空型(ロボットハンド)
「真空型」は吸引型ともよばれ、真空を発生する設備やエアコンプレッサーが必要なため、装置全体が大きくなる傾向があります。機構自体は単純で、大きなワークも運べますが、表面に水や油が付着していたり、凹凸や穴があると、うまく吸着できないため注意が必要です。
磁力型(ロボットハンド)
「磁力型」は電磁石を用いており、電流を流すことでワークを吸着することができます。真空型が苦手とする凹凸のある形にも対応できますが、磁力を用いるため、扱えるワーク材質が、一部の金属などに限られます。
ロボットハンドを選ぶ際のポイント

さまざまな種類のロボットハンドから、自社の工程にあったものを選ぶ際に考慮すべきポイントを解説します。
ロボットハンドの把持・吸着力
重いワークを扱えるかどうかは、ロボットアームの可搬重量だけでなく、ロボットハンドの把持・吸着力が影響します。
また、ワークの材質や形状、表面の状態によっては、把持・吸着力を発揮できない場合があります。選定対象のロボットハンドが、扱うワークに対応しているかどうかを必ず確認しましょう。
特に共通のロボットハンドで複数種類のワークを扱う際には、注意が必要です。
ロボットハンドの材質
特に食品など、やわらかい材質のワークを扱う場合には、ワークを傷付けないようにロボットハンドの材質に注意が必要です。近年は、食品工場での使用を想定した、エラストマー製のロボットハンドが開発されています。
ロボットハンドの制御精度
ロボットハンドの指の位置や把持力、吸着力を細かく調整できるかどうかも重要なポイントです。多くの産業用ロボットは位置制御を行っていますが、ワークが不定形であったり、位置がずれている場合、精密な制御をすることができません。
精密な制御をする場合には、力覚センサなどを活用して力の制御をする必要があります。位置が一定でない場合でも、ロボットハンドでつかむ際の力が一定になるように制御を行えば、ワークを傷つけずにつかむことが可能です。
ロボットハンドの信頼性
ロボットハンドは、常に作動し続けているため大きな負荷がかかります。特に段取り替えがなく、同一のロボットハンドを継続的に使用する場合には、高い信頼性が必要です。
信頼性が低い場合、使用していくなかで性能が低下してしまうため、頻繁なメンテナンスや交換が必要になってしまい、コストアップにもつながってしまいます。
ロボットハンドの活用例
ロボットハンドの具体的な活用例を紹介します。
3Dビジョンを活用して最適なつかみを行う
バラ積みのワークを扱う場合、ワークの位置や向きが一定ではありません。そこで、「3Dビジョンセンサ」で取得した情報をもとに、把持型のロボットハンドを制御することで、ワークの位置や向きにあわせた最適なつかみ方が可能です。
周囲のセンサとロボットハンドを連携させることで、ロボットの前工程で人が整列などの作業を行う必要がなくなり、生産性向上や作業者の負荷軽減につながります。
協働ロボット向けの汎用性が高いロボットハンド
協働ロボットは、作業者の代わりにラインに入ることが可能で、移動をさせて複数の工程を担うこともあります。その都度ロボットハンドを交換して対応することもできますが、複数の工程に対応した汎用性の高いロボットハンドであれば、交換が不要です。
例えば、ワークと密着していない状態でも吸着が可能なロボットハンドであれば、従来の吸着型ハンドが苦手としていた、球状や円筒状のワーク、凹凸の多いワークにも対応することが可能です。
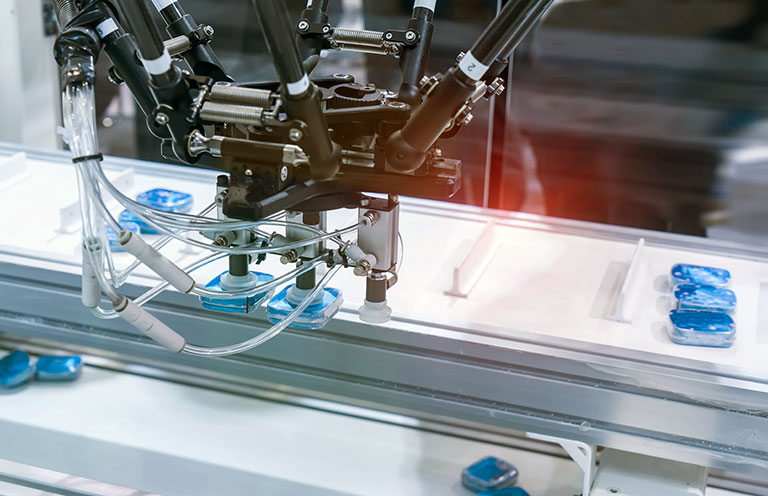
崩れやすい食品向けの吸着ロボットハンド
ラスクやクッキー、スポンジケーキなどを扱う場合、把持型ロボットハンドでは、割れたり崩れたりしてしまったり、吸着型ロボットハンドでは、食品のカスが原因でうまく吸着できないことがあります。
吸着型のロボットハンドを採用しつつ、食品のカスを処理することで、食品を傷つけずに整列や包装機への投入を行うことが可能です。
ロボットハンドの選定は、ロボットSIer「アルフィス」にご相談ください
産業用ロボットではさまざまなワークを扱うため、それぞれのワークに適したロボットハンドの選定が必要です。ロボットハンドを選ぶ際には、ワークの材質や重さ、表面の状態、やわらかさなどを考慮する必要があります。また、信頼性や制御精度を考慮することで、自社の生産性向上や人手不足解消を実現できるでしょう。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、使いやすく・導入しやすい、高品質なロボットシステムをご提供しています。
三品産業でのロボットハンドの選定でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。


