- Before
- 毎分400個の速度で供給される冷凍オムレツを、5~6人で手作業でトレー詰め。
- After
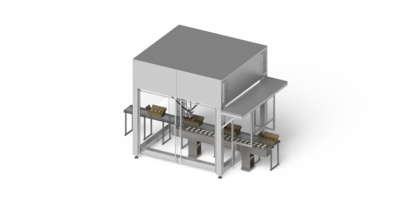
- パラレルリンクロボット4台で自動化。人員はトレー詰め前にオムレツを表に
返す作業に1名、トレー詰め後のチェック・穴埋めに1名となり、2~3名の省人化を実現。
| ワークの種類 | 冷凍食品 オムレツ 寸法:幅10㎝程度 |
|---|---|
| 納入先 | 冷凍食品メーカー |
| 工程・用途 | トレー詰め |
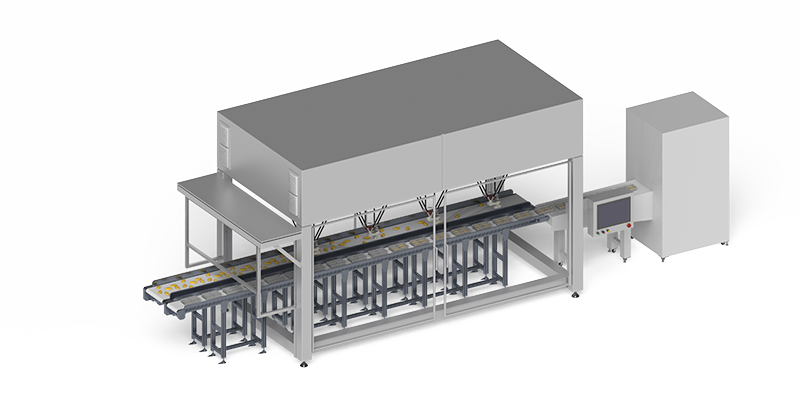
| プロダクト | パラレルリンクロボット搭載高速ピッキングシステム |
課題
人手不足に加え、衛生上の観点からも省人化を望んでおり、多くの人手がかかるトレー詰め作業の自動化を望んでいた。
冷凍食品を手作業で扱うと指先が冷たくなるため、長時間繰り返すことは負担の大きい作業だった。
オムレツには表裏があるが、カメラで表裏の認識は難しい。さらに、冷凍食品はコンベヤ上で滑ってしまうため、カメラで認識した位置からずれることがある。
ご提案
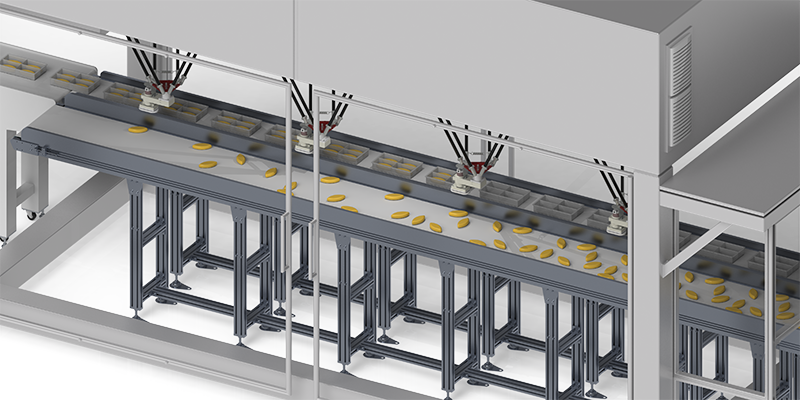
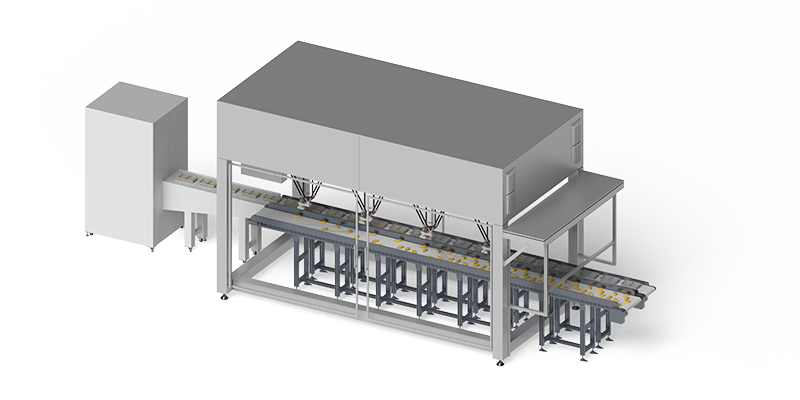
1台の筐体にロボットを4台搭載することで、省スペースで高い処理能力を実現。
ロボットプログラムには衝突回避機能があるため、ロボットが可動範囲を共有していても
ぶつからずスムーズにトレー詰めが可能。
オムレツの表裏を認識するには、高度な画像処理が必要になるため、人員1名で事前に表向きにそろえたのちにロボットが箱詰めをすることでコスト削減。
オムレツの供給量はばらつきがあり、少ない時にはトレーが埋まらないことがあるため、人が目視でチェックを行い、欠けているマスを埋めることで員数不足を防止。
カメラ認識後のワークの位置ずれは、コンベヤの設計や材料選定などのノウハウにより小さくする。
装置の動き
①振動フィーダからコンベヤ上に冷凍オムレツが供給される。
②裏返っているオムレツがあれば、手作業で表に向ける。
③ロボット4台でオムレツを2×2のトレーのマスに1つずつ詰める。
④トレー詰め後に人が目視で、オムレツが入っていないマスがないかチェック。
漏れていたマスに手作業でオムレツを詰める。
⑤そのままコンベヤでトレーを次工程(包装工程)に送る。