












食品工場では、食品をさまざまな状態で扱います。例えば、袋詰めがされる前の「未包装品」や、ひとつひとつ包装された「個包装品」、またそれらを箱詰めした状態などがあげられます。
それぞれの工程に特有の課題があるため、人手不足から工場の自動化を検討する場合は、個別に対策を検討することが重要です。
この記事では、未包装品・個包装品・それらの箱詰め工程について、その課題や自動化のポイントを解説します。
箱詰め作業の課題

箱詰め作業は、単純な作業を長時間続ける必要があります。作業者のミスによって、異物混入や不良品が発生する恐れがあるため、常に集中して作業を行う必要があります。
このような根気のいる作業は、作業者への負担も大きく、人の採用がうまく進まなかったり、採用できてもすぐに辞めてしまったりといった課題があります。人手不足の状況から、作業工程の自動化に注目が集まっています。
JA土佐くろしお…労力のかかる箱詰め作業を機械化するため、同年、南国市の会社に開発を依頼し、ミョウガのパックをアームでつかみ箱詰めするロボットが完成した。包装に不備がないかをチェックするカメラが連動し、不良品は除外され、箱には入らない。
三品産業での包装品・箱詰め工程の自動化でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。
箱詰め作業の自動化ポイント
食品業界では、扱う製品がそれほど大きくないことから、スペース効率を重視した人員配置が行われます。その配置を変更せずに作業を自動化しようとしても、産業用ロボットの導入はむずかしいため、協働ロボットの導入が検討されます。
また、新規ラインや、製品切り替えなどのタイミングであれば、ビジョンセンサと組みあわせた「パラレルリンクロボット」などの産業用ロボットも検討することができます。
自動化を目的としてロボットを導入する場合には、コンベアや計量機などの周辺設備との連携も考慮する必要があります。
未包装品・個包装品を扱う作業の課題
未包装品を扱う作業の課題

焼き菓子やチーズなどの「未包装品」は、コンベア上を流れる工程で、計量機に投入したり、自動包装機に投入できるように整列させる作業が必要です。
未包装品の多くは、一定量をまとめて袋詰め・箱詰するため、その前準備となる整列の工程は、短時間でこなす必要があります。しかし、人の速さには限界があり複数人で作業をせざるを得ないため、人件費がかさみます。
また、包装機に投入するため未包装品を整列させる際は、稼働中のコンベア上に一定の間隔で、向きを揃えて並べる必要があります。この作業を長時間続けて行うためには、集中力と体力が必要であり、ミスなくこなすのは容易ではありません。
未包装品を扱う作業の自動化ポイント
一般的に、未包装品は「割れやすいもの」「崩れやすいもの」「つかみにくいもの」が多いため、ロボットが苦手とする分野です。その難易度の高さから、ロボットによる自動化が選択肢に入らないこともあるでしょう。また、むき出しの製品を直接ロボットで扱うことになるため、異物混入が発生しないように、衛生面にも十分に配慮する必要があります。
未包装品の自動化では、個々の形や向きを正しく把握し、未包装品が崩れたり、変形したりしないように注意しながら、素早くピックアップする必要があります。
例えば、人の目の代わりとなる「ビジョンセンサ」で位置や向きを把握し、高速で正確に動作できる「パラレルリンクロボット」を複数台組み合わせる構成が考えられます。
個包装品を扱う作業の課題

「個包装品」の整列や箱詰め作業では、既に包装された製品を扱うため、未包装品に比べると異物混入のリスクは低くなります。しかし、製品の包装が崩れたり、汚れがつかないように注意しながら、整列や箱詰めを行う必要があるため、こちらも集中力が必要です。
また、箱詰めを行う際には、重量の測定が必要な場合があります。この作業をスムーズにこなすには、ある程度の経験が必要です。経験がなくても計量機を見ながら細かく調整することは可能ですが、時間がかかってしまうため、生産効率の低下につながります。
個包装品を扱う作業の自動化における課題とポイント
個包装品は、製品ひとつひとつが「紙」や「ビニールのフィルム」などで覆われていることが多いため、包装が外れないように注意しながら扱う必要があります。
また、箱に余分なスペースがあると輸送中に製品が傷ついてしまうため、箱詰めの際には隙間はほとんどありません。狭い隙間に製品を詰めていく場合、製品の側面や下面を保持するのはむずかしいため、ロボットハンドを使い上面を保持する必要があります。
個包装品や箱が傷ついているとクレームになる可能性が高いため、生産効率とともに、高い精度での作業が必要とされます。
包装品・箱詰め工程の自動化例

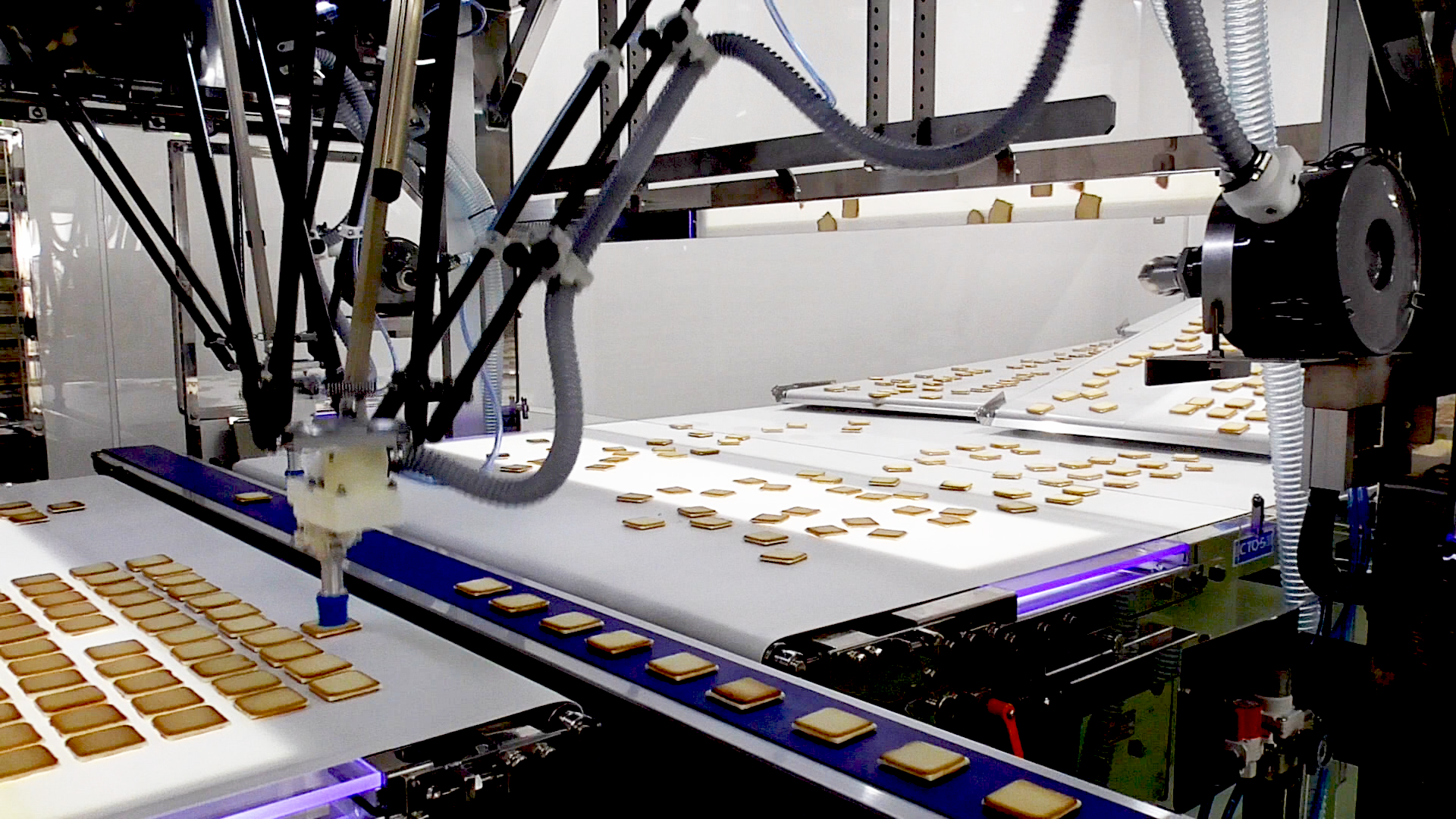
パラレルリンクロボットによる、包装品・箱詰め工程の自動化例を紹介します。
焼き菓子(未包装品)を次工程に送る作業を自動化
クッキーなどの焼き菓子の製造工程では、コンベアで流れてくる焼き上がったお菓子を、並べ替える作業が必要でした。クッキーが割れないように注意しながら並べ替えるためには、複数人での作業が必要です。
そこで、高速・高精度のパラレルリンクロボットを導入。ビジョンセンサでクッキーの位置や向きを認識しながらピックアップし、一定間隔で整列させることが可能になりました。
自動化をすると、コンベアが停止した際に、焼きあがったクッキーがあふれてしまう懸念がありますが、ロボットの退避機能によって、製造したクッキーを横に逃すことも可能です。
焼き菓子(個包装品)をトレーに詰める作業を自動化
ピロー包装された焼き菓子は、箱詰めをする前にトレーに詰める必要があります。縦2列・横3列・高さ3段ずつ詰める場合、つかんだ焼き菓子を離す位置を、詰める個数によって調整する必要があり、自動化のむずかしい工程でした。
そこで、高速のパラレルリンクロボットを導入。横3列を1回の動作で詰められるロボットハンドを採用し、精度の高い位置制御を行うことで、複雑な工程の自動化が実現します。
包装品・箱詰めは、ロボットSIer「アルフィス」にご相談ください
包装品・箱詰め工程の自動化は、製品の状態に応じた課題があり、自動化がむずかしい工程です。特に未包装品は、やわらかさやその形状から扱いがむずかしく、ビジョンセンサによる位置や向きの特定、ロボットハンドの活用がポイントとなります。自動化の需要が大きいため、今後も導入は進んでいくでしょう。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、パラレルリンクロボット搭載の「高速ピッキングシステム」をはじめ、さまざまなロボットシステムをご提供しています。
三品産業での包装品・箱詰め工程の自動化でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。


