











ロボットビジョンの導入で重要になってくるのは、カメラの選定です。
高機能なものを選んでも使わない機能が多く、不要な費用を使ってしまう事になります。
逆に安価なものを選ぶと現場に必要な機能が備わってない可能性もあります。
カメラの選定は、導入する現場にあったスペックのものを選ぶことが大切です。
本記事では、カメラ選定の基準となるパーツやスペックをご紹介いたします。
ロボットビジョン導入時のカメラ選びの際にお役立てください。
また現場にあったカメラの選定もお手伝いさせていただきます。
3Dロボットビジョンを検討されている方は、ぜひ一度、アルフィスまでお問い合わせください。

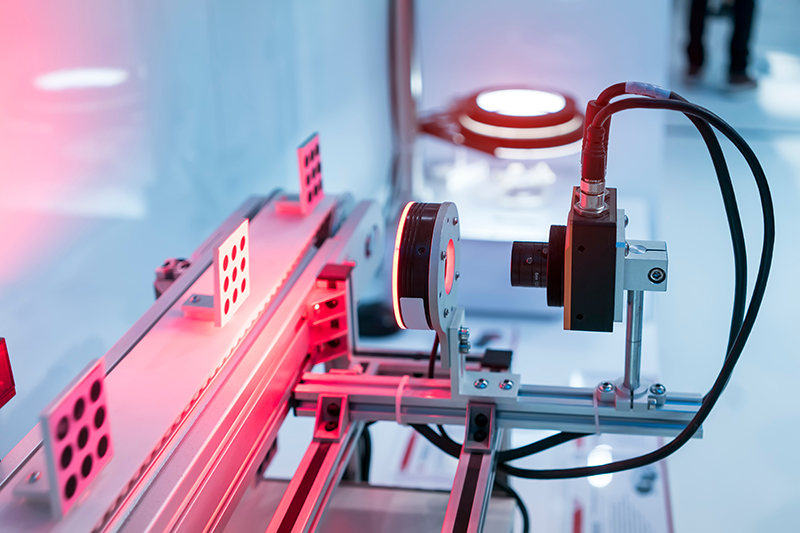
ロボットビジョンカメラにおけるイメージセンサー(撮像素子)
イメージセンサーとは、光の強弱を電気信号に変換するセンサーで、人間でいうところの「目」にあたります。
「画素数」や「ピクセル」と表記されることが多く、その数値が大きければ大きいほど取り込む画像は綺麗になりますが、その分コストは高くなってしまいます。そのため現場に合わせて必要なスペックのものを選ぶことが大切です。
またセンサーも大きく分けて「CCDセンサー」と「CMOSセンサー」の2種類があります。
どちらもセンサーでとらえた光の強度や色を電気信号に変える働きをしますが、電荷の処理方法が異なります。元々は「CCDセンサー」が主流でしたが、「CMOSセンサー」の性能向上に伴い、近年は「CMOSセンサー」が主流になってきています。
CMOSイメージセンサーとは
Complementary Metal Oxide Semiconductorの略。メモリ、マイクロプロセッサはCMOSで作製される。低消費電力であり、最も汎用に用いられている半導体技術である。現在携帯電話などに入っているイメージセンサーもCMOS技術を用いており、CMOSイメージセンサー技術により高精細に高速で画像化が可能。
ロボットビジョンカメラにおけるフレームレート
フレームレートとは、1秒当たりに撮影できるフレーム数を示しており、「fps」という単位で記載されます。この数値が大きいほど撮影速度が向上しますが、1秒当たりの撮影枚数が増えるのでデータ量も大きくなります。
フレームレートは速いほど良いというわけではなく、撮影対象物に動きがなければ、低速のもので十分です。
フレームレートの幅は、10fps(低速)から340fps(高速)まで幅広く存在するため、カメラで捉える搬入物の速度など状況に合わせてあったものを選定しましょう。
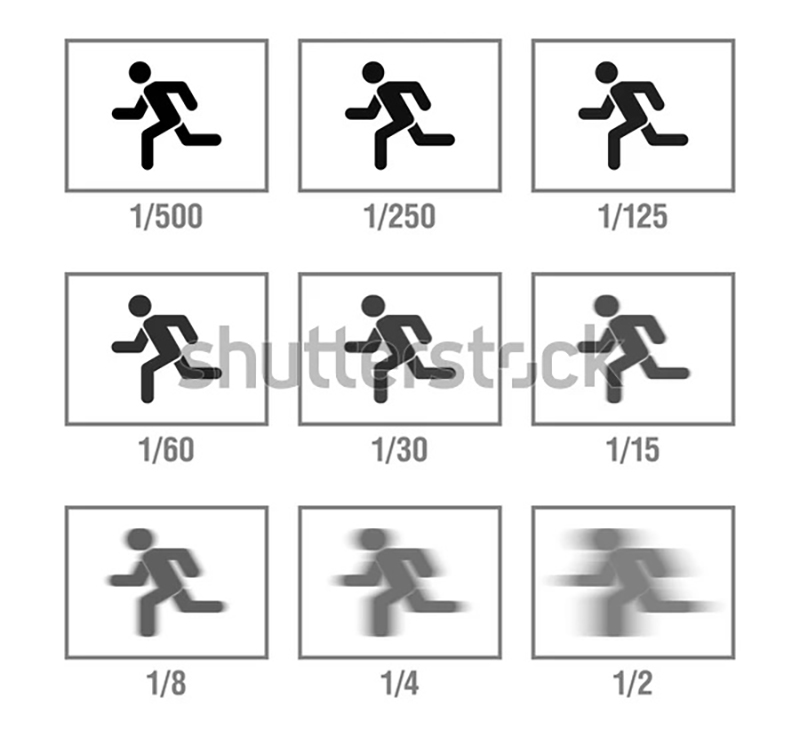
ロボットビジョンカメラにおけるシャッタースピード
(取り込み速度)
シャッタースピードとは、光を取り込む時間のことで、「1/30秒」や「1/1000秒」というように記載されます。この数値が短いほど、被写体に対してブレなく撮影を行うことが出来ます。逆に長ければ長いほどシャッターを開き、光を取り込む時間が長くなるためブレが発生しやすくなります。しかし夜間や暗所など光が少ない場所で使用する際は、光を多く取り込む必要があるので、シャッタースピードが遅い方が綺麗に撮影することができます。
ロボットビジョンカメラにおける波長域
波長域とは、カメラがとらえる光の範囲です。設定された範囲によって「モノクロ」や「カラー」など撮影する色の情報が異なります。モノクロカメラは情報量が少なく、保管容量が小さく済むのでモノクロを選ばれるお客様も多くいらっしゃいます。
また「可視光」と呼ばれる人間の目に見える光以外にも「X線」や「紫外線」「赤外線」のような人間の目に見えない光に波長域を設定する事も可能です。
これにより人間の目では判別できない微細な色や材質の違いも見分けられるようになります。
3Dビジョンと2Dビジョンについて
2Dビジョンは縦横の情報のみを取得しており、3Dビジョンは奥行きの情報まで考慮した画像の取得・分析を行うことが可能です。
これまで、平面的なワークの形状確認や外観検査には、2Dビジョンが使用されていましたが、バラ積みされたワークのなかからワークをピックアップすることは困難でした。
3Dビジョンでは、奥行き(3D)の情報を取得することで、人間の目と同様に「ワークまでの距離」を正確に測定することができます。そのため、バラ積みされたワークのピックアップを、人間と同等の精度で実現することが可能となりました。

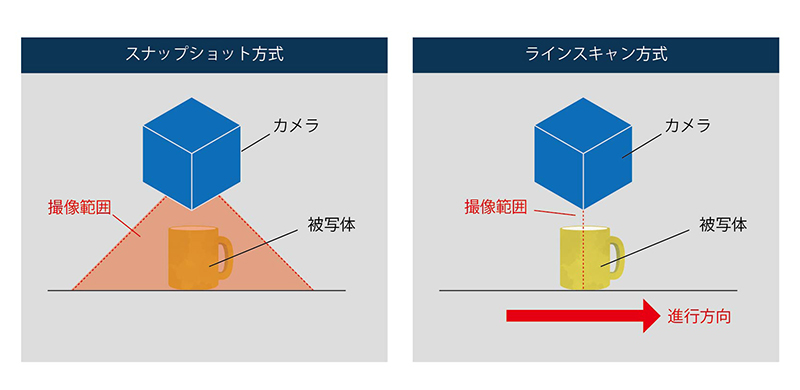
ロボットビジョンカメラにおける撮像方式
撮像方式には「スナップショット方式」と「ラインスキャン方式」の2種類が存在します。「スナップショット方式」とはワンショットで撮像を行うもので、スマートフォンなどの一般的なカメラにも用いられている撮像方式です。画像の取得・処理が同時に完了しますが、撮像範囲が限られているため大きな被写体などには向いていません。
一方、「ラインスキャン方式」は工場のラインなど一方向に動くものを連続高速撮像し、1枚の画像に合成処理を行います。「スナップショット方式」に比べ広範囲を撮像できるので、円柱形の被写体や大きなワークに対して有効です。
ロボットビジョンカメラにおけるシャッター方式
カメラは対象をシャッターで切り取ることで、その瞬間を捉えます。
シャッターには、まぶたのように閉まる「グローバルシャッター」とシャッター部が回転する「ローリングシャッター」の2種類が存在します。「グローバルシャッター」は高性能ですが、その分高価なものが多いです。「ローリングシャッター」は「グローバルシャッター」に比べると比較的安価ですが、動くものを撮影すると被写体が歪んでしまうことがあります(ローリングシャッター現象)。

ロボットビジョンカメラにおけるハウジング(筐体)
マシンビジョンを設置する場所によって筐体の選定が重要になる場合もございます。生産ラインの装置内など狭い場所に設置する際は、コンパクトサイズの筐体が求められます。コンパクトサイズの場合は、中のパーツも小さな筐体に収まるものを選定する必要が発生してきます。
また現場によっては防爆性、防湿性、防水性等が求められる場合もございます。
その場合はIPコードを確認の上、筐体を選定する必要があります。
IPコードとは「外来固形物(異物)」と「水」の侵入に対する保護性能(防じん・防水性能)を表す規格です。
ロボットビジョンのカメラの選定は、ロボットSIer「アルフィス」にご相談ください
今回はマシンビジョンに関わる代表的な用語などを紹介いたしました。
マシンビジョンの選定の際は上記で紹介した以外にも選定するポイントはございます。
またパーツの組み合わせなども重要になってきます。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、高品質なロボットシステムをご提供しています。
産業用ロボットの導入でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。


