
- Before
- 担当者1名が手作業で、毎日数種類の培地を調製。種類が多い日は丸1日かかることもある。
- After
- ロボット1台で全自動で調製。人の作業は材料のセットとタッチパネルの操作のみ。作業速度は人と同程度。
| ワークの種類 | 粉体/液体/フラスコ/ビーカー ※容器はガラス製 |
|---|---|
| 納入先 | 食品メーカーの開発・検査等研究関係部門 |
| 工程・用途 | 液体培地の調整 (粉体・液体の計量/攪拌/フィルアップ工程/pH調整) |
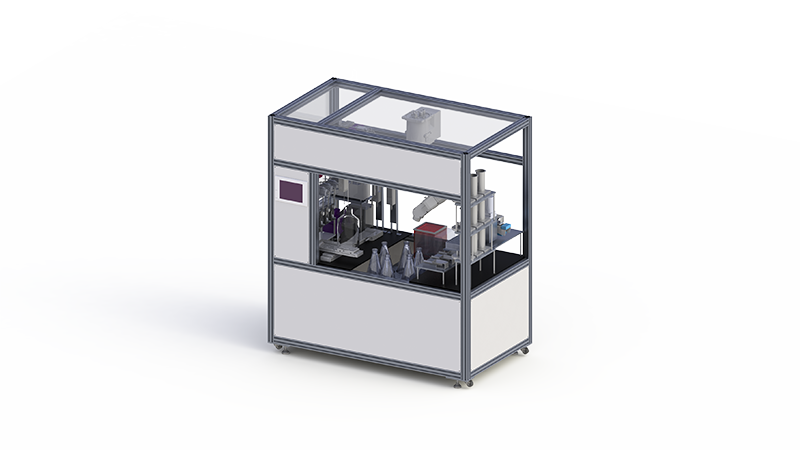
| プロダクト | 6軸ロボット・単軸ロボットを使用した自動化装置 |
課題
0.1mgで粉体を計量する細かい作業があり、煩雑で負担が大きい作業から作業者を
開放したい。
繰り返し作業はロボットに任せ、担当者を別の業務にあたらせることで人材を活用。
細かい計量作業をロボットで正確に行い、品質を安定化。
ご提案
粉体の計量には2種の振動フィーダを使用し、効率と正確さを実現。
最小50μL単位の高精度なシリンジポンプで液体を供給。
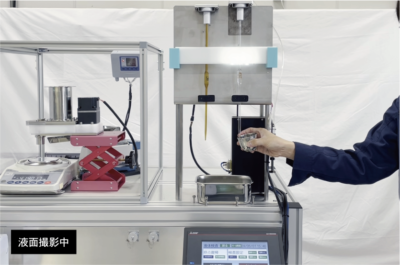
最大の課題である粉体の正確な計量のために事前評価を行い、確実の導入効果のある装置を
設計。
装置の動き
①使用する材料と容器を装置にセットし、タッチパネルでレシピを選択。
②⑴粉体計量:6軸ロボットが粉体供給トラフをストックから取り出しフィーダへセット。
⑵液体計量:6連のシリンジポンプで液体を供給。
⑶攪拌:羽付きの攪拌棒を回転させて攪拌。
⑴~⑶をレシピで決められた回数ずつ行う。
③フィルアップ工程:ポンプで純水粋等を入れて希釈し、規定量まで増やす。
④pH 調整機で既定の値までpH を調整。
⑤完成した培地を3~5つに小分けにする。小分け容器は回転するラックにセットされており、
未充填の容器が自動でポンプの吐出口下に移動する。
※各工程間の培地容器の移動は、単軸ロボットで搬送する。