カテゴリー別アーカイブ:
技術コラム
物流業界では、作業効率や人手不足の解消が重要な課題であり、その解決策として注目を集めているのがピッキングロボットです。 この記事では、ピ...
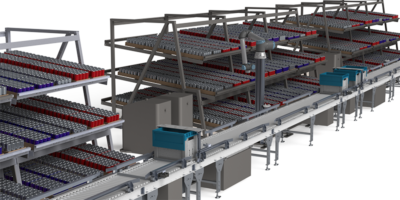
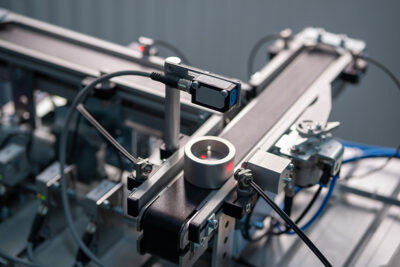
光電センサは光を利用したセンサのことで、その用途の広さから様々な場所で活用されています。 日常的な場面では「テレビやエアコンなどのリモコ...
物流や製造業において、効率的な荷積み作業が求められる場面で「パレタイズロボット」が注目されています。 導入によって生産性や精度の向上が期...
2026年に国内で開催予定のロボット産業関連の展示会情報をまとめました。 この記事の目次 ロボット業界 ロボットワールド/産業用ロボット...
生産ラインの効率化や自動化を検討されている担当者様向けに、この記事では、産業用ロボットの主要メーカーを国内外からご紹介します。 導入検討...
製造業では少子高齢化による人手不足や技術継承など様々な問題が発生してきています。 そんな中、今まで手作業で行って来た工程をロボットなどの...
商品や製品を外観から検査し、品質の保証や安全を保証する外観検査は、食品工場には欠かせない業務です。 色や形状、異物の混入などを正確にチェ...
AI(人工知能)といえば、ChatGPTのような生成AIがよく話題に上がりますが、生成AI以外にも様々な種類のAIが我々の生活の中に入り...
協働ロボットは、作業者の代わりをするロボットとして注目されています。 一般の産業用機械とは異なり、人間の作業に近い動作が可能です。製造ラ...
産業用ロボットの導入には関連する設備・システムを含めて多くの費用がかかることから、導入をためらっている中小企業も多いでしょう。しかし、も...
重量検査装置と聞くと、重さを測るためだけの機械と思われることがあります。 しかし、重量検査装置はただ重さを測るだけの装置ではなく、より深...
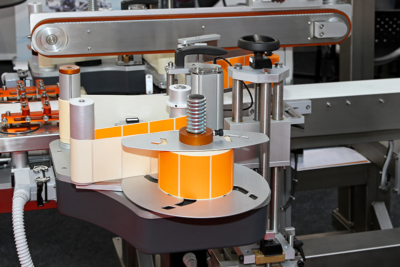
多くの食品には、食品ラベルが貼られています。 食品ラベル貼りは効率化しなければ作業者に多くの負担がかかるため、作業方法を見直すことが重要...