












製造業では深刻化する人手不足への対策として、あるいは品質の安定や過酷作業の代替を目的として、人が行っている作業のロボット化が進んでいます。食品製造業界も同様の状況にありますが、HACCP基準を満たす必要があるという点において、他の業界よりロボット導入の難易度が上がります。特に、材料となる生鮮食品の投入工程や完成した製品の梱包前工程などでロボットが直接生の食品に触れるような場合には、異物混入等の発生を防ぎ食品安全性を高めるために、ロボットに求める条件が厳しくなります。
ロボットを使った自動化システム全体のうち、特に衛生管理に配慮した設計にすべき箇所としては、ロボット本体とロボットハンド(エンドエフェクタ)部があります。本記事では、その2つについて現在どのようなものが作られているのかを紹介します。
生の食品のハンドリングに適したロボットの種類
食品の製造に使われる装置は、頻繁に清掃と殺菌を行います。アルコール等の薬品で拭いたり噴霧したりするため、耐薬品性の高い表面素材や、気密性の高い関節部の機構などロボットが劣化しづらい工夫が必要です。また、ロボットの塗装がはがれたり粉塵が発生するリスクもあります。
こういったリスクに対する対策はすべてのロボットに施されてはおらず、使用できるロボットの種類は限られています。
食品対応仕様のロボット
一般の仕様とは異なる、食品や医薬品等に向けた特別仕様のロボットが、各メーカーから販売されています。
ロボットそのものが薬品洗浄を行う前提で作られており、以下のような特徴があります。
・表面カバー等の樹脂部品には、耐薬品性を高めるコーティングが施されたプラスチックが使用されている。
・金属部品には耐腐食性が高いステンレス素材を採用している。
・凹凸の少ない形状をしており、最近等が発生しづらく洗浄もしやすい。
・関節部分の気密性が高く、可動部等に食品機械用のグリースが塗布されている。
2種類の食品対応仕様のロボットを紹介します。
①(株)安川電機 MOTOMAN-GP8
8kg可搬の6軸垂直多関節ロボットで、オプションで食品対応使用があります。
MOTOMAN-GP8
②三菱電機(株) MELFA Fシリーズ
医薬品や食品対応の、耐環境仕様ロボットです。
垂直多関節形と水平多関節形の2種類があり、それぞれにリーチや可搬重量が数種類用意されているため、工程に合わせて選択できます。
MELFA Fシリーズ
ロボットカバー
ロボットのハンド部分以外の全体にかぶせることで、様々な環境からロボットを守る「ロボットカバー」というものがあります。ロボットカバーを使用することで、外部環境からロボットへの腐食等を防ぐことと、ロボットから発生する粉塵の食品への混入を同時に防ぐことができます。
食品対応以外にも耐汚性、耐薬品性、耐熱性など様々な用途に合わせて作られており、ロボットメーカーからアクセサリとして販売されているほかに、ロボット周辺機器メーカーでも製造しています。
オーダーメイドで制作しているロボットカバーメーカーなどもあり、選択できるロボットの幅が広がります。
パラレルリンクロボット
パラレルリンクロボットはシンプルで部品数の少ない構造から清掃性が高く、昔から食品工場に多く採用されています。3方向からロボットハンドの位置を制御する方式により高速・高精度という特徴があり、6軸多関節ロボットなどのような幅広い工程・作業にマッチする自由度の高差はありませんが、代わりに小さい物や軽いものを少し離れた位置に高速で運搬する、という作業は特に得意としているため、コンベアの載せ替えや整列・箱詰めといった食品の梱包工程では大活躍します。
JRC【ALFIS】のパラレルリンクロボット事業は、1995年にパラレルリンクロボットを日本で初めて市場導入して以来、食品や医薬品業界を中心に700台以上納入しており、生の食品をパラレルリンクロボットで搬送する装置の開発には長年蓄積したノウハウがあります。

生の食品のハンドリングに適したハンドツール
ハンドツールは、ロボットの先端で直接食品をつかむ部分になります。食品の衛生面だけでなく、食品をつぶさず優しくピック&プレイスするために、ハンドツールの選定や設計は非常に重要です。
ロボットで生の食品をハンドリングするためにハンドツールに求められる条件について、材質とつかみ方の2点から説明します。
生の食品のハンドリングに適したハンドツールの材質
ハンドツールの材質としては、食品対応の樹脂やステンレスなどが使用されます。
直接食品に触れる部分だけでなく、根本部分なども同じように洗浄や殺菌を行うため、ハンドツール全体が食品対応の素材で構成されている必要があります。
真空で食品を吸着する吸着ハンドなどには、先端部にゴムのパッドが使われています。多くはシリコンゴムですが、一部には食品衛生法適合のニトリルゴムなども使用されます。
プラスチック素材としては、食品衛生法に適合する物から選択します。PA樹脂、POM樹脂、PET樹脂、PEEK樹脂などがあります。
金属部品の場合はほとんどがステンレス部品です。
生の食品のハンドリングに適したチャック方式
ワークをロボットでハンドリングする際に使われるハンドツールは、吸着型と把持型でその多くを占めており、生の食品のハンドリングにおいても変わりません。
吸着型は上述のように真空で吸着して持ち上げるかたちで、ワークの真上からあるいは斜め上方向などから吸着します。
吸着面がなるべく固く平らで変形しないワークに適しており、クッキーや固い冷凍食品などに適しています。吸着できれば形や重さに多少のばらつきがあっても持ち上げることができるため、不揃いな形状の食品にも向いています。
食品を吸着する際に食品カスを吸い込むため、清掃を行ったり、カスがを排出する機構が必要です。また、吸着パッドが劣化し破れると異物混入につながるため、食品製造業では定期的な交換がその他の業界以上に重要です。
吸着箇所に強い力がかかるため、プリントがすれてしまったりトッピングがあると外れて吸い込まれてしまったり、柔らかい食材の場合変形してしまいますので、そういった場合は把持型を使います。
把持型は複数のツメで人の手のようにワークを握ります。食品の側面を挟んだり、下側にツメを入れて持ち上げることもできるため、上面を保護したい場合に有効です。
基本的には一定の力で一定の位置まで詰めを動かして挟む構造をしていますが、それだとある程度形や大きさがそろっているワークにしか対応できません。そのため、最近では爪部分が柔らかい素材になっていて変形したり、センサで把持力を調整しながら持ち上げるような、不揃いな形状でも把持できるハンドツールが続々と開発されています。

生の食品をロボットでハンドリングする事例
JRC【ALFIS】で設計した生の食品のハンドリング事例を2つご紹介します。
事例① 包装前のお菓子のピック&プレイス
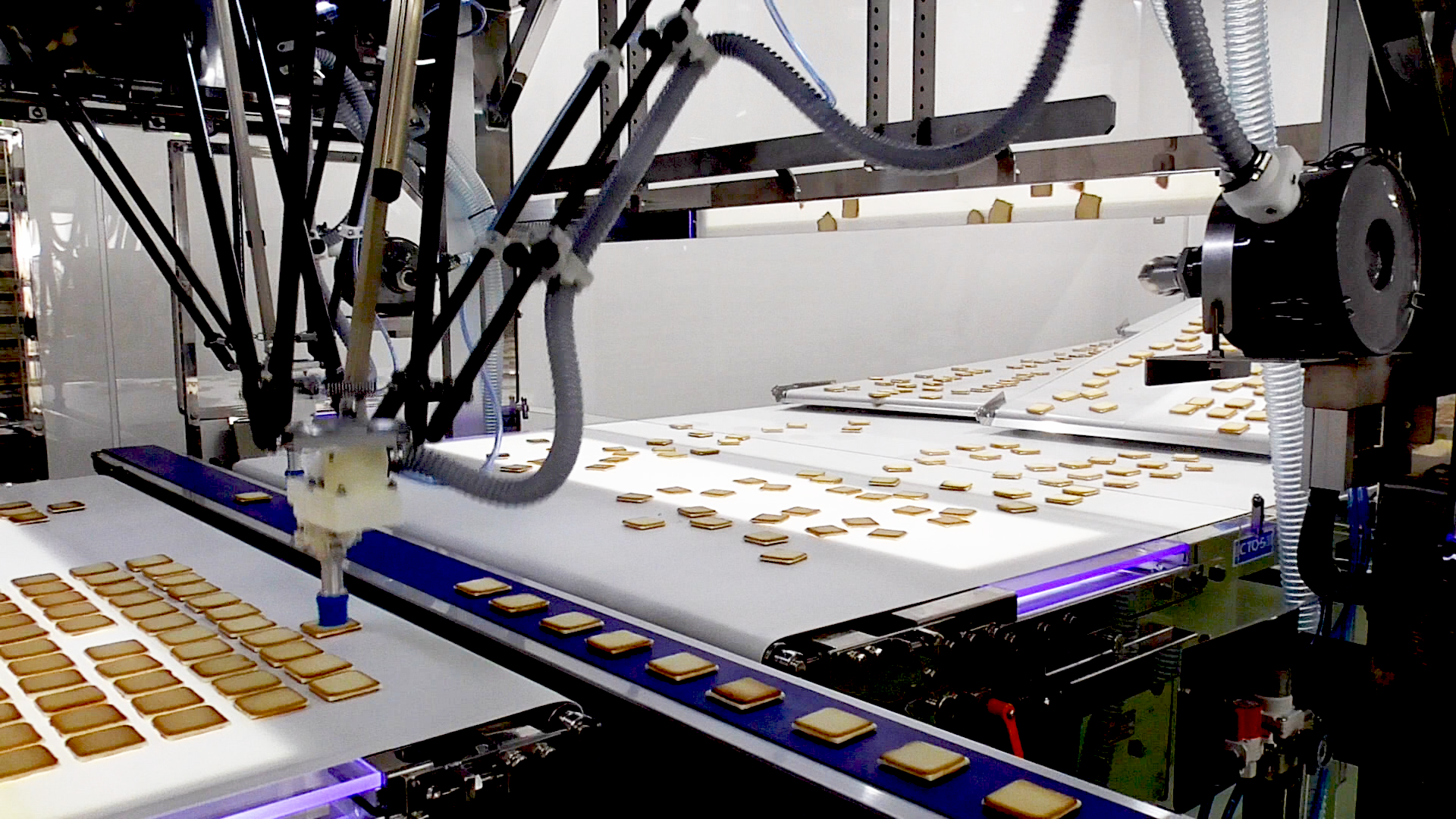
焼きあがったラングドシャを横ピロー包装機へ投入するために整列する工程を、ロボットで自動化しました。
幅の広いゆっくりとしたコンベア上にランダムに載ってラングドシャが流れてくので、1つずつ吸着して持ち上げ、ピロー包装工程用のコンベアに1列に整列させます。
大量に流れてくるラングドシャを高速で流れる細いコンベアに移載するために、パラレルリンクロボット2台で作業を行います。

事例② 生のパン生地をトレーに整列

パン工場で、1個分ずつ切り分けられたパン生地をトレーに並べる作業をロボットで自動化しました。
もちもちとしたパン生地はハンドにくっつきやすいため、離形性の高いテフロン(PTFE)素材のツメをハンドツールに採用しています。
生の食品のピック&プレイスは、ロボットSIer JRC【ALFIS】にご相談ください
生の食品をピック&プレイスする工程では食品安全性を担保するための工夫が求められたり、ワークが食品であることによる独特の課題などがあるため、
ロボット導入の際にはロボットの知識だけでなく食品製造に関するノウハウも必要です。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、食品ラインにおすすめのパラレルリンクロボット搭載高速ピッキングシステムをはじめとした様々なロボットシステムをご提供しています。
生の食品のピック&プレイスでお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。


