- Before
- 焼きあがったラングドシャを2名が
手作業で目視検査し、包装機へ供給。
- After
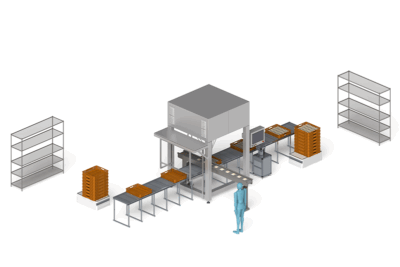
- パラレルリンクロボットを2台搭載した
高速ピッキングシステムを使い、
全自動で次工程用コンベアへ載せ替え・整列。
| ワークの種類 | ラングドシャ/焼き菓子/食品/未包装品 |
|---|---|
| 納入先 | 菓子メーカー: マツザワホールディングス株式会社 |
| 工程・用途 | 搬送/ コンベア載せ替え/ 整列 |
| プロダクト | パラレルリンクロボット搭載 高速ピッキングシステム |
課題
生の食品を扱う工程であるため、清潔性が求められる。
コンベアから次のコンベアに載せ替えるだけの単純作業だが、一度に大量に流れてくるため
人員を2名配置している。
ご提案
清掃性・清潔性の高いパラレルリンクロボットであれば、食品を直接ハンドリング可能。
ロボット同士が可動範囲を共有しながらぶつからずに動くことができるため、
狭いスペースに2台設置でき、2名分の作業を省スペースでロボット化。
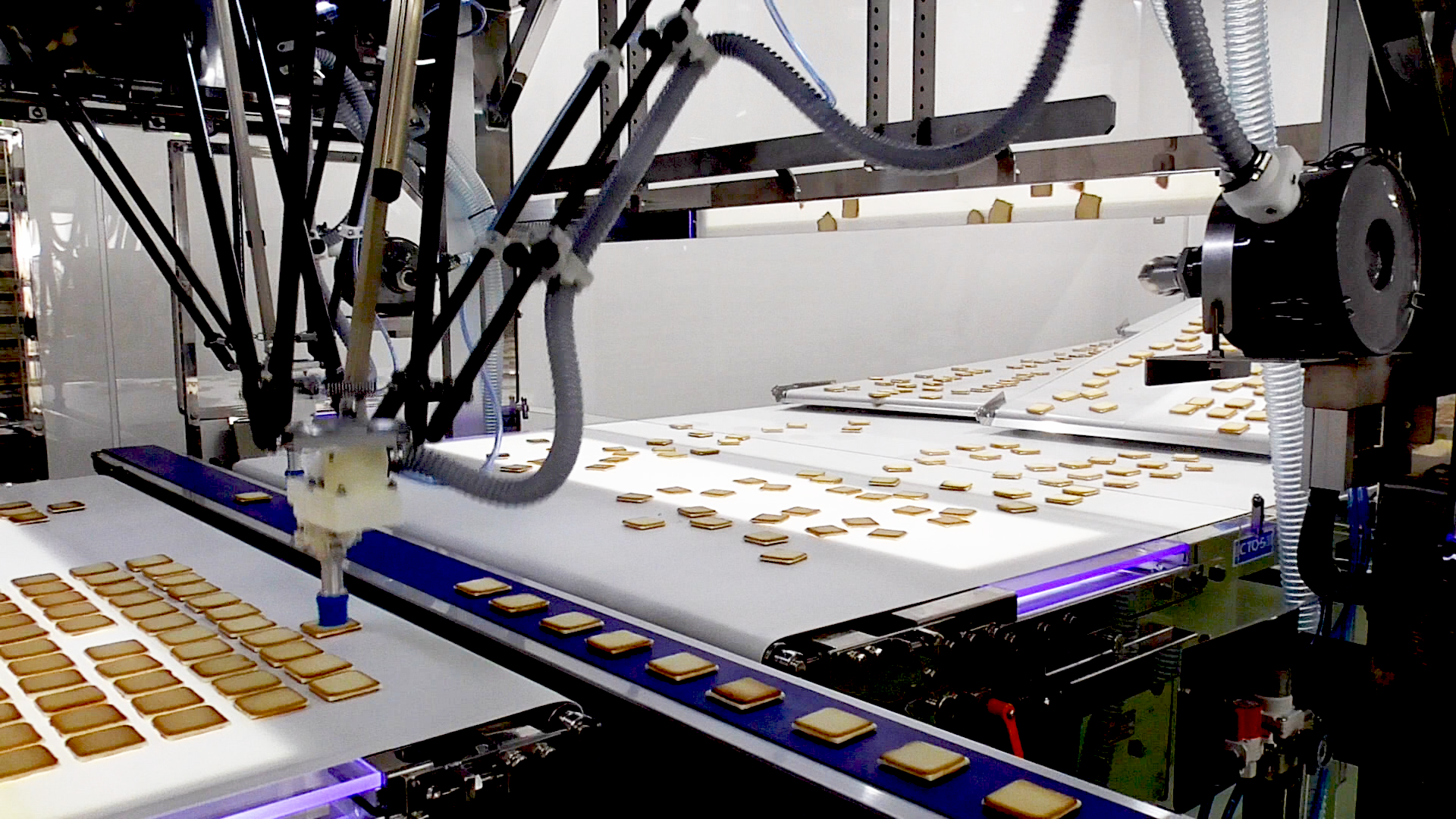
ロボットの動き
①焼きあがったラングドシャがランダムに流れてくる。
②1個どりハンドのロボット2台でラングドシャをピック。
③次の画像検査工程のコンベア上に1列に整列・載せ替え、次工程へ送る。
④後工程が停止しているときは、装置に搭載のバッファーコンベアに載せ替える
ことでロスを防止する。
⑤後工程が稼働再開した際は、前工程のコンベアと同時並行でバッファーコンベア
上のラングドシャも次工程用コンベアへ載せ替える。
事例動画