











ロボットでワークをつかむための「ロボットハンド」は、ロボットメーカーや周辺機器メーカーなどから様々な種類のものが販売されています。しかし、ワークのピック方法やプレイス方法、あるいはワーク本体に特徴があるため市販品のロボットハンドが採用できないケースは珍しくありません。
本記事では、JRC【ALFIS】がロボットシステムの設計に合わせてロボットハンド開発を行った様々な事例をご紹介します。

食品のピック&プレイス自動化でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。
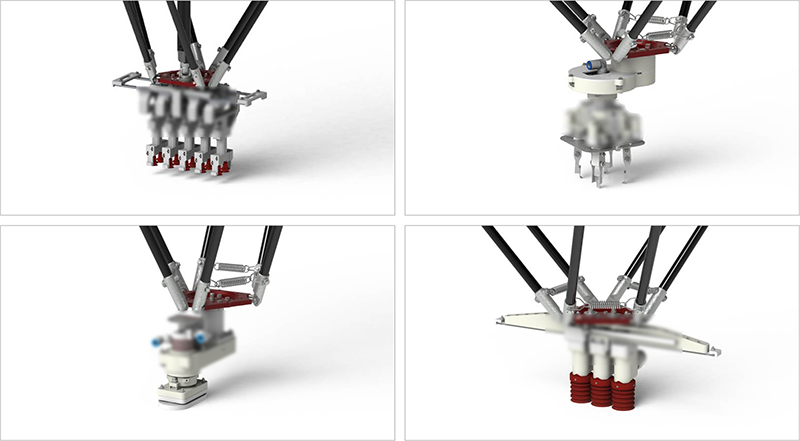
把持型ロボットハンド
まずは把持型のロボットハンドからご紹介します。ロボット先端に取り付けたツメで、ワークを挟み込んで持ち上げるタイプのロボットハンドです。
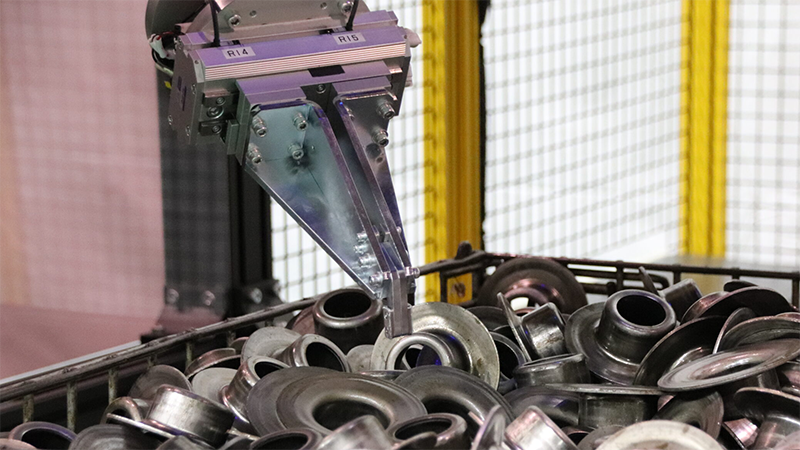
食品用把持型ロボットハンド
焼き菓子を重ねて搬送するための、4つ爪チャックハンドです。
包装前に、コンベヤ上を流れてくる焼き菓子を2枚縦に積み上げて整列する工程で使用されました。
| ロボットの種類 | パラレルリンクロボット |
|---|---|
| ワーク | 焼き菓子 |
| 材質 | ステンレス(ツメ部分) |
| 工程 | 焼き菓子の搬送 |
1枚目をピック後2枚目の上に1枚目を一度置き2枚まとめてもちあげるという動きをするために、このロボットハンドはピック時やプレイス時、搬送中に重ねた2枚がずれないような設計になっています。
重ねた2枚を変形しない程度に押さえられるパッドが取り付けられており、爪を開く・閉じるときのタイミングにもポイントがあります。
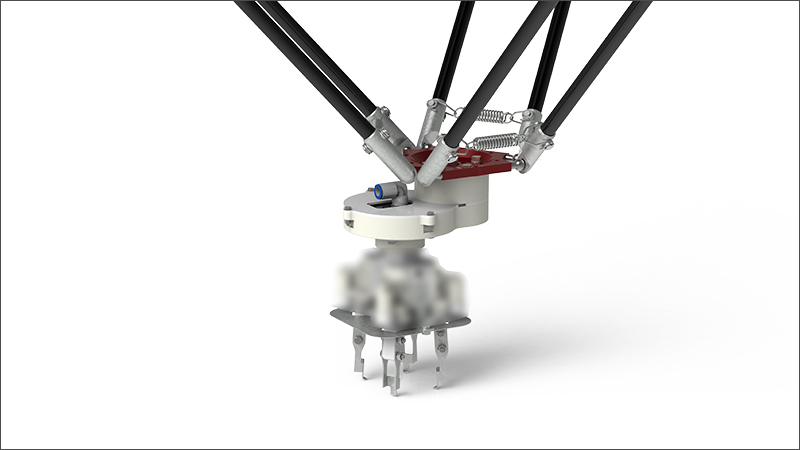
内径把持型ロボットハンド
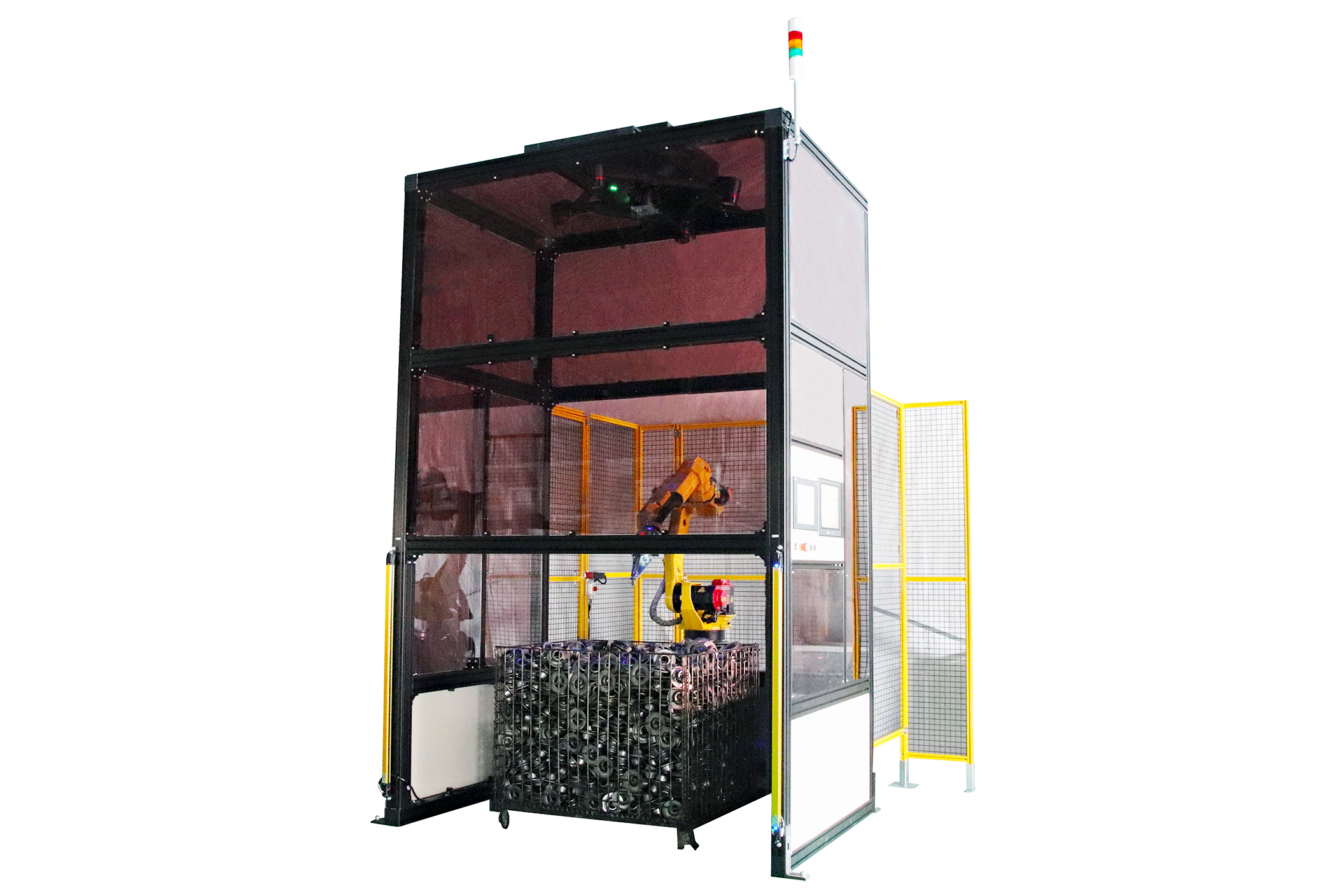
ドーナツ型のワークの内側の穴にハンドのツメを差し込み、ツメを広げてワークをつかむロボットハンドです。JRC本社工場で、ロボットを用いてバラ積み状態の部品を取り出し、コンベヤ上に整列する工程に使用されています。
| ロボットの種類 | 産業用ロボット |
|---|---|
| ワーク | ハウジング(金属製のローラー部品) 外径60㎜~160㎜の範囲で10種類 |
| 材質 | ステンレス(ツメ部分) |
| 工程 | メッシュパレットからのバラ積みピッキング |
深いメッシュパレットの底の方にあるワークまでロボットがアプローチできるようにするために、ツメ先が曲がっています。
ハンドツールのツメは消耗品であり、交換部品がすぐに作れることが望ましいため、メッキ等の後処理が不要なステンレス素材が採用されています。
外形把持型ロボットハンド

段ボールや瓶ケースのパレタイジングに使用されているロボットハンドです。
| ロボットの種類 | 産業用ロボット |
|---|---|
| ワーク | 段ボール(約18kg) / 瓶ケース(約23kg) |
| 材質 | ステンレス(チャックパーツ) |
| 工程 | パレタイジング |
パレタイジング工程ではワークを隙間なく積み上げないといけないため、分厚いロボットハンドが使用できません。
薄い板状のツメで重い箱をしっかり持ちあげるために箱の側面を広い面積で掴み、片側のハンドで底も支えています。
吸着型ロボットハンド
続いて、吸着型のロボットハンドを4種類紹介します。把持型との大きな違いは、上面1面のみからのアプローチでワークをピック出来ることです。
食品用吸着型ロボットハンド

焼きあがったお菓子がコンベヤ上をバラバラに流れてくるのを、外観検査・包装前に整列させる工程で使われているロボットハンドです。
| ロボットの種類 | パラレルリンクロボット |
|---|---|
| ワーク | 焼き菓子 |
| 材質 | シリコンゴム(パッド部分) |
| 工程 | 搬送・整列 |
生の食品に触れるため、パッドには食品衛生法対応のシリコンゴムが使用されています。
食品から発生するカスで詰まらないようにフィルターが入っており、日々清掃するためメンテナンス性のを意識して設計されています。

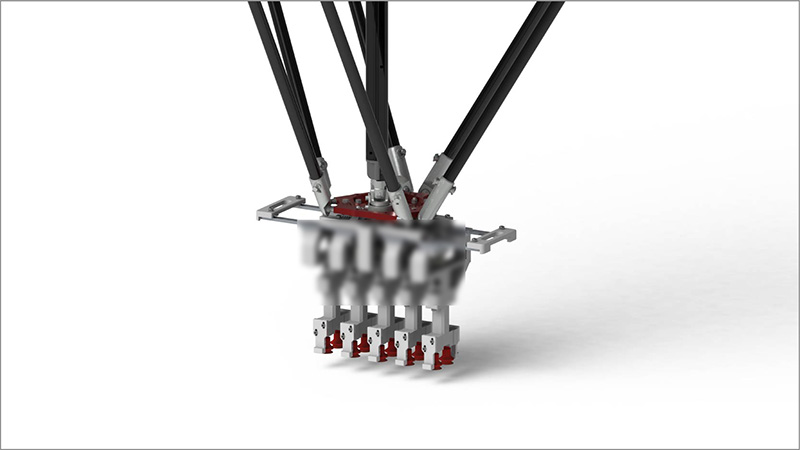
3個どり吸着型ロボットハンド 間隔自由可変タイプ

ピロー包装機で個包装されたお菓子を3つまとめてピックし、トレーに詰める工程で使われているロボットハンドです。
| ロボットの種類 | パラレルリンクロボット |
|---|---|
| ワーク | 焼き菓子 |
| 材質 | シリコンゴム(パッド部分) |
| 工程 | 搬送・トレー詰め |
ピロー包装機から送られてくるお菓子は等間隔ではありませんが、だからといって1つ1つピック&プレイスを繰り返していては、時間がかかってしまいます。そのため、お菓子を3つ一気に吸着できて、かつ間隔を変えることができるハンドツールが採用されています。

5個どり吸着型ロボットハンド 間隔可変タイプ
医薬品などに使用されるPTPシートを10個ずつ1束に束ねたパックを、5つ並べて箱に詰める工程で使われているロボットハンドです。
| ロボットの種類 | パラレルリンクロボット |
|---|---|
| ワーク | PTPシート |
| 材質 | シリコンゴム(パッド部分) |
| 工程 | 搬送・カートン詰め |
コンベヤ上では1パックごとに間隔があいていますが、箱には隙間なく詰める必要があります。そのため、間隔が広い状態でピックし、間隔が狭い状態で箱にプレイスできる、間隔可変タイプのロボットハンドを設計しました。
重量物向け吸着型ロボットハンド

段ボールをパレットに積みつける、ロボットパレタイズシステムに搭載されているロボットハンドです。
| ロボットの種類 | 協働ロボット |
|---|---|
| ワーク | 段ボール(15kg) |
| 材質 | 段ボール向け高耐久ゴム(パッド部分) |
| 工程 | 搬送・パレタイジング |
段ボール搬送に適した、耐久性のある吸着パッドが使用されています。段ボールに付着した紙材の切れ端を吸い込んでしまうことがあるため、内部のつまりを防ぐためのメッシュフィルターを内蔵しています。
持ち上げた段ボールを搬送途中に落としてしまうと中の製品が破損する恐れがあるため、吸着力が落ちていないかセンサで監視しており、吸着力が弱い時には持ち上げずに停止します。これにより、フィルターの定期清掃は不要となっています。
ツールチェンジャー|ロボットハンド
ロボットハンドに追加で搭載する、ツールチェンジャーについてご紹介します。
1つのロボットシステムで複数のワークを取り扱ったり、工程の内容が変わるような場合に、ハンドツールを交換することがあります。
このための機構を「ツールチェンジャー」と呼びます。
ツールチェンジャ―にはロボットがハンドツールを交換する自動タイプと、手動で取り外し・取付を行う手動タイプがあります。自動タイプは手動タイプと比べて費用がかかるため、交換頻度が少ない場合は手動で交換する方が、コストパフォーマンスに優れています。
ワーク変更に合わせたツールチェンジャー(袋用⇔段ボール用)
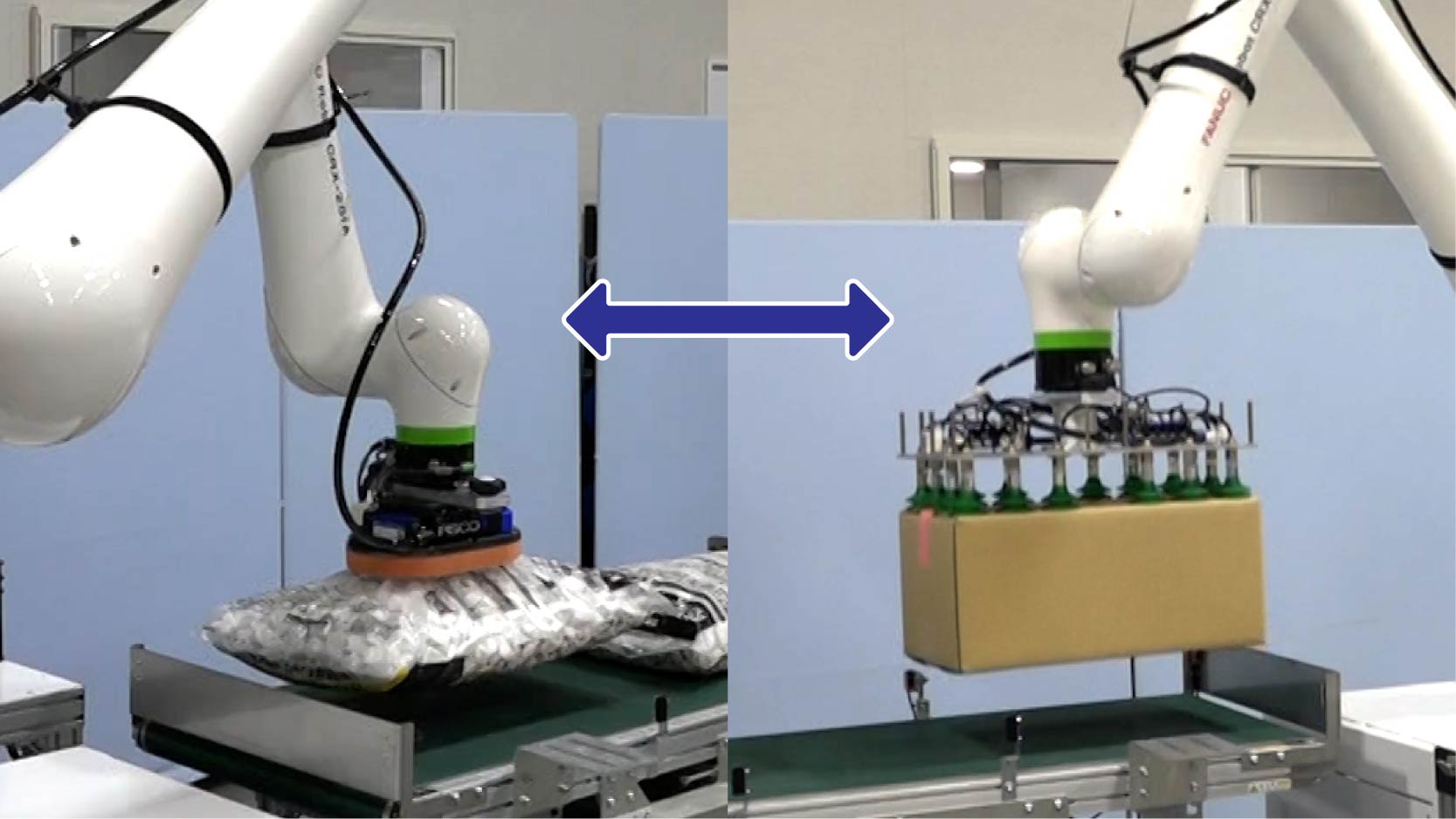
デパレタイジング工程で、袋物と段ボールの両方を1台のロボットデパレタイズシステムで対応するために搭載されました。
袋物が積まれたパレットと段ボールが積まれたパレットが、どちらも入荷するような場合に、こういったハンドツールが必要となります。
| ロボットの種類 | 協働ロボット |
|---|---|
| ワーク | 砂利入り袋/段ボール |
| 工程 | 搬送・パレタイジング |
エアーで吸着しているため、ハンドツールにはエアーチューブと信号線の2種類をつないでいます。これらを簡単につけ外しできるように、コネクタ化しワンタッチで操作できるように設計します。
これにより、上記の事例ではロボットとハンドツールの取り外しと配線まで含め、作業員1名で20秒ほどで交換が行えます。
ロボットシステムの導入は、ロボットSIer「アルフィス」にご相談ください
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、使いやすく・導入しやすい、高品質なロボットシステムをご提供しています。
ロボットによる自動化でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。


