












産業用ロボットの先端に取り付けワークをつかむパーツを「ロボットハンド」あるいは「エンドエフェクタ」と呼び、ワークのつかみ方にはワークを2本以上のつめで挟んでつかむ「把持型」とワークを吸着してつかむ「吸着型」の2種類があります。

本記事では、吸着ハンドの特長について詳しく解説いたします。
吸着ハンドをつかったロボット化でお困りでしたら、ぜひ一度、アルフィスまでお問い合わせください。
ロボットシステムに吸着ハンドを使用するメリット・デメリット
吸着ハンドには、空気を吸い込む力でワークとロボットハンドの間に真空を発生させ、ワークを持ち上げるタイプと、電磁力の力で磁性のあるワークを持ち上げるタイプがあります。
吸着ハンドを使用するメリットとデメリットを紹介します。
ロボットシステムに吸着ハンドを使用するメリット
吸着ハンドは、把持ハンドと比較して以下の様なメリットがあります。
■ つかんだりはなしたりするのが速い
把持ハンドの場合、ワークをつかむ時やはなす時にはつめを動かす時間がかかりますが、吸着ハンドの場合は一瞬でつかむ・はなすの動作を行えます。作業のタクトタイムを短くすることができるため、高速でたくさんのワークを運ぶ作業などに向いています。
■ ワークとの接触面が1面のみ
吸着ハンドは平らな面が1面あれば、吸着して持ち上げることができます。把持ハンドははさんでつかむ方式である以上、向かい合う2か所以上の個所を持たなければいけないため、アプローチできる面が小さい薄いプレートなどをピックすることは困難ですが、吸着ハンドであれば簡単にピック出来ます。
ロボットシステムに吸着ハンドを使用するデメリット
吸着ハンドは、把持ハンドと比較して以下の様なデメリットがあります。
■ 使用できるワークが限られている
真空で吸着するハンドの場合、空気が漏れないことが必須です。その為、穴が開いた形状や大きな凹凸のある表面形状のワーク、布や紙のような通気性のあるワークも持ち上げることができません。
磁気で吸着するハンドの場合は、磁性体であることが必須です。材質自体が問題なくても、磁気をかけてはいけない機械部品などにも使用ができません。
■ メンテナンスが必要
吸着力が下がると、ワークを持ち上げられなかったり、運んでいる途中に落としてしまいます。吸着力不足を防止するためには、定期的なメンテナンスを実施しなければなりません。
真空で吸着するハンドは、ノズルからほこりなどこまかいごみを吸い込んでしまうことが避けられません。内部に取り付けたフィルターを交換したり清掃することで、吸着力低下を防ぎます。また、ハンドの先端に取り付けられたパッドも劣化するため、定期的な交換が必要です。
磁気の場合はコイルの劣化などが吸着力の劣化につながります。この場合も部品交換などで対応することになります。
ロボットシステムに使用するエアー式吸着ハンドと電動式吸着ハンド
真空により吸着するハンドには、コンプレッサー等で圧縮空気を送って真空を発生させる「エアー式」と電動真空ポンプの力で吸着する「電動式」があります。
エアー式吸着ハンド
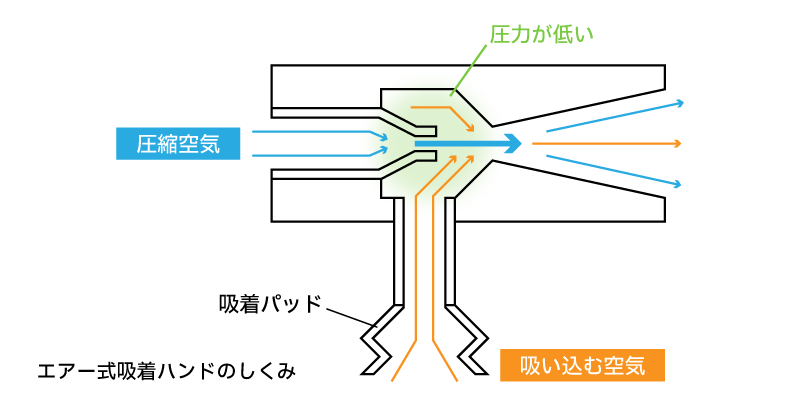
エアー式の吸着ハンドは、コンプレッサーから送られた圧縮空気をノズルで絞ることで速度を上昇させ、圧力が下がることにより発生する真空を利用しています。
速度上昇と圧力の関係は「ベルヌーイの定理」で示されています。
流体の圧力はその速度に依存し,速度が増すにつれて圧力は減少することを示す原理である。
引用元:大阪教育大学実践学校教育講座 種村研究室
電動式吸着ハンド
電動式の吸着ハンドはコンプレッサー等の設備が要らず、電力を供給するだけで真空を生み出しワークをピックすることが可能です。エアー供給がなく、コンプレッサーを設置するスペースのない場所に設置したり、設置場所を移動してロボットを使いたい場合などにとても便利です。
ただし、エアー式と比べると吸着力が弱く、重いものを持ち上げる場合はエアー式の方が適しています。
ロボットシステムに使用する吸着ハンドのアタッチメント
吸着ハンドはノズルが直接ワークに触れるのではなく、先端に柔らかい素材のアタッチメントを取り付けて使うことが一般的です。
アタッチメントには、ワークとの隙間をなくし吸着力を高めたり、ワークに傷や跡がつかないようにする役割があります。
吸着パッド

最もよく使われているアタッチメントは、ニトリルゴムやシリコンゴムなどのゴム素材でできた吸着パッドです。
弊社では生の食品を直接ロボットでハンドリングする作業の自動化を行うことがありますが、そういった場合には食品衛生法適合素材のゴムを使っています。

様々なサイズのワークを1つの吸着ハンドで持ち上げたいときや、重いワークを持つために荷重を分散させたいときなどに、小さい吸着パッドをたくさん並べたハンドツールを採用することがあります。

スポンジ

吸着パッドは段ボールなどの平らな面のワークを強力に持ち上げることができますが、袋状のワークなど不定形の表面に対してはスポンジが有効です。吸着パッドと比較すると吸着力は劣りますが、表面に傷や吸着跡が付きにくいため、デリケートな材質にも適しています。
表面に細かい凹凸があるワークや、柔らかくて強い力をかけると変形してしまうワークなどにも使用できます。
非接触タイプ
吸着ハンドとワークとの間にエアクッションを発生させ、非接触状態で持ち上げることができるハンドツールがあります。密着させて真空を発生させる場合とは異なり、大きな凹凸によりパッドを密着させられないワークや穴が開いていて空気が漏れるワーク、布や紙などの通気性のある素材でできたワークを吸着することが可能です。
ロボットシステムの導入は、ロボットSIer JRC【ALFIS】にご相談ください
産業用ロボットではさまざまなワークを扱うため、それぞれのワークに適したロボットハンドの選定が必要です。ロボットハンドを選ぶ際には、ワークの材質や重さ、表面の状態、やわらかさなどを考慮する必要があります。また、信頼性や制御精度を考慮することで、自社の生産性向上や人手不足解消を実現できるでしょう。
ALFIS〈アルフィス〉では、工場の人手不足・生産性の課題を解決するロボットSIerとして、使いやすく・導入しやすい、高品質なロボットシステムをご提供しています。
ロボットハンドの選定でお困りでしたら、ぜひ一度、下記問い合わせフォームよりお問い合わせください。


