トップページ
ALFISについて
ALFIS のミッション
ALFIS ロボットシステムの特長
会社概要
事業所・拠点一覧
提携企業
SOLOMON
製品情報
ロボットパッケージ
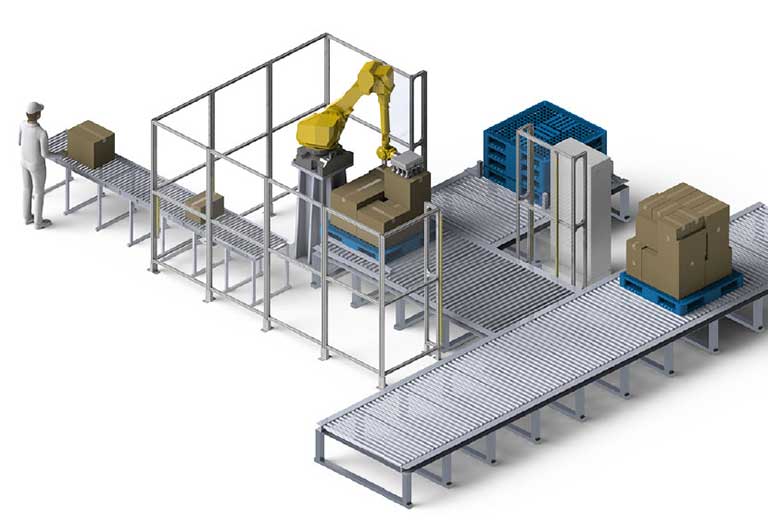
ロボットパレタイズシステム
ロボットデパレタイズシステム
バラ積みピッキングシステム
ロボットケーサー
移動式・協働ロボットユニット Robogie
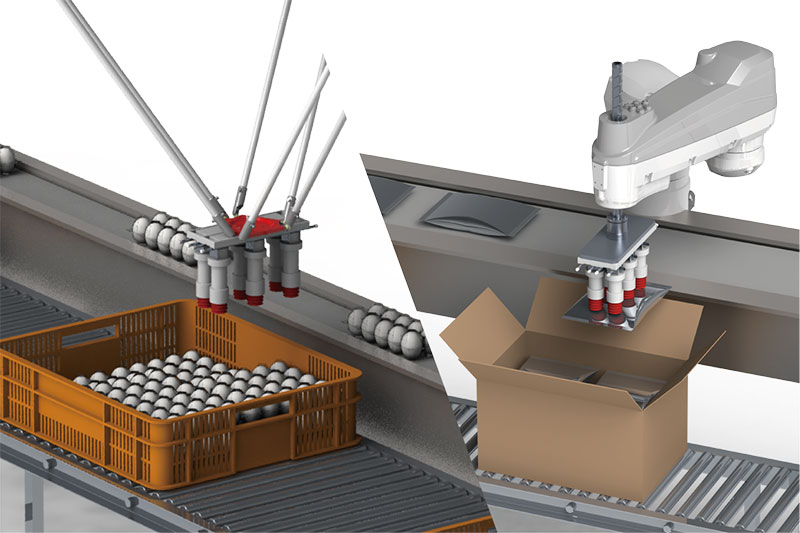
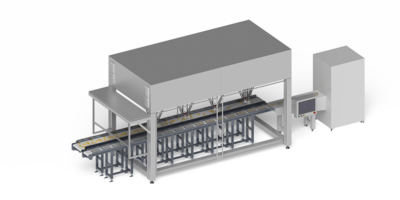
高速ピッキングシステム
自動機OEM
お役立ちコラム
課題解決コラム
技術コラム
ロボット導入事例
資料ダウンロード
新着情報
中途採用
お問い合わせ
個人情報保護方針
クッキー(Cookie)等の取り扱いについて
サイトマップ
ALFIS〈アルフィス〉|株式会社JRC ロボットSIerブランド
事業所・拠点一覧
新着情報
中途採用
パートナー募集
ALFISについて
about
ALFISについて
一覧を見る
ALFIS のミッション
ALFIS ロボットシステムの特長
会社概要
事業所・拠点一覧
提携企業
製品・サービス
products
ロボットパレタイズシステム
(パレット積み付け自動化)
ロボットデパレタイズシステム
(パレット荷下ろし自動化)
バラ積みピッキングシステム
パラレルリンクロボット搭載
高速ピッキングシステム
ロボットケーサー
移動式・協働ロボットユニット Robogie(ロボギー)
自動機 OEM
お役立ちコラム
Column
課題解決コラム
技術コラム
お問い合わせ
資料ダウンロード
新着情報
news
JRC ロボットSIer〈アルフィス〉
新着情報
電磁弁とは何?基本概念から製造現場における具体的な使用例まで解説
2024年12月16日
技術コラム
吸引で物を持ち上げたり、風圧で商品についたゴミを吹き飛ばしたりと産業ロボットに欠かせない存在である『電磁弁』。 今回はそんな電磁弁の基礎...
冬季休業のお知らせ
2024年12月01日
お知らせ
誠に勝手ながら、弊社は下記の期間、全社、冬季休業とさせていただきます。 【冬季休業期間】2024年12月28日(土)〜2025年1月5日...
冷凍食品(オムレツ)のトレー詰め
2024年11月23日
課題解決コラム
Before 毎分400個の速度で供給される冷凍オムレツを、5~6人で手作業でトレー詰め。 After パラレルリンクロボット4台で自動...
画像検査における照明の選び方とは?検査方法とよく使われる照明を紹介
2024年11月15日
技術コラム
画像検査(外観検査)とは画像処理技術を使用して製品や部品の品質を評価するプロセスのことで、正確な画像処理のためにはカメラセンサの性能だけ...
把持ハンドとは?産業用ロボットのハンドツールを解説
2024年10月17日
技術コラム
産業用ロボットの先端に取り付けワークをつかむパーツを「ロボットハンド」あるいは「エンドエフェクタ」と呼び、ワークのつかみ方にはワークを2...
金属部品を洗浄機へ自動で投入・取り出し
2024年10月17日
課題解決コラム
Before 切削加工後の金属部品を洗浄機へ 投入し、洗浄後に取り出す作業を、 作業者1名が手作業で行っていた。 After 金属部品を...
完全子会社(三好機械産業株式会社)の 吸収合併(簡易合併・略式合併)に関するお知らせ
2024年10月11日
お知らせ
詳細についてはこちらからご覧ください。...
「国際物流総合展 2024」で展示されました
2024年09月19日
展示会
去る2024年9月10日(火)より東京ビッグサイトで開催されました「国際物流総合展 2024」Mech-Mind株式会社様ブース内にて、...
段ボール箱・袋物ワークを兼用デパレタイズ
2024年09月15日
課題解決コラム
Before パレットで入荷した原材料を手作業で デパレタイズし、コンベヤで加工工程へ搬送。作業員1~2名で作業を行って いる。 Aft...
吸着ハンドとは?産業用ロボットのハンドツールを解説
2024年09月15日
技術コラム
産業用ロボットの先端に取り付けワークをつかむパーツを「ロボットハンド」あるいは「エンドエフェクタ」と呼び、ワークのつかみ方にはワークを2...
«
‹
2
3
4
›
»
ブラウザの設定で、JavaScriptを有効にしてください。